11.2: Интегрирование систем
Одной из важнейших концепций проектирования является интегрирование систем. Как уже обсуждалось ранее, зачастую проект бывает разделен на несколько подсистем. Интегрирование систем заключается в способе объединения отдельных подсистем в процессе проектирования с целью создания целостного изделия. Это процесс, который реализуется на каждом этапе проектирования, а не только на завершающей фазе всей работы над проектом, после выполнения сборки каждой отдельной подсистемы. Каждая подсистема работает хорошо и поддерживает остальные подсистемы робота таким образом, что единое целое представляет собой нечто гораздо большее, чем сумма всех отдельно взятых частей. В процессе проектирования очень важно учитывать влияние каждой подсистемы на работу других подсистем, а также их совместимость.
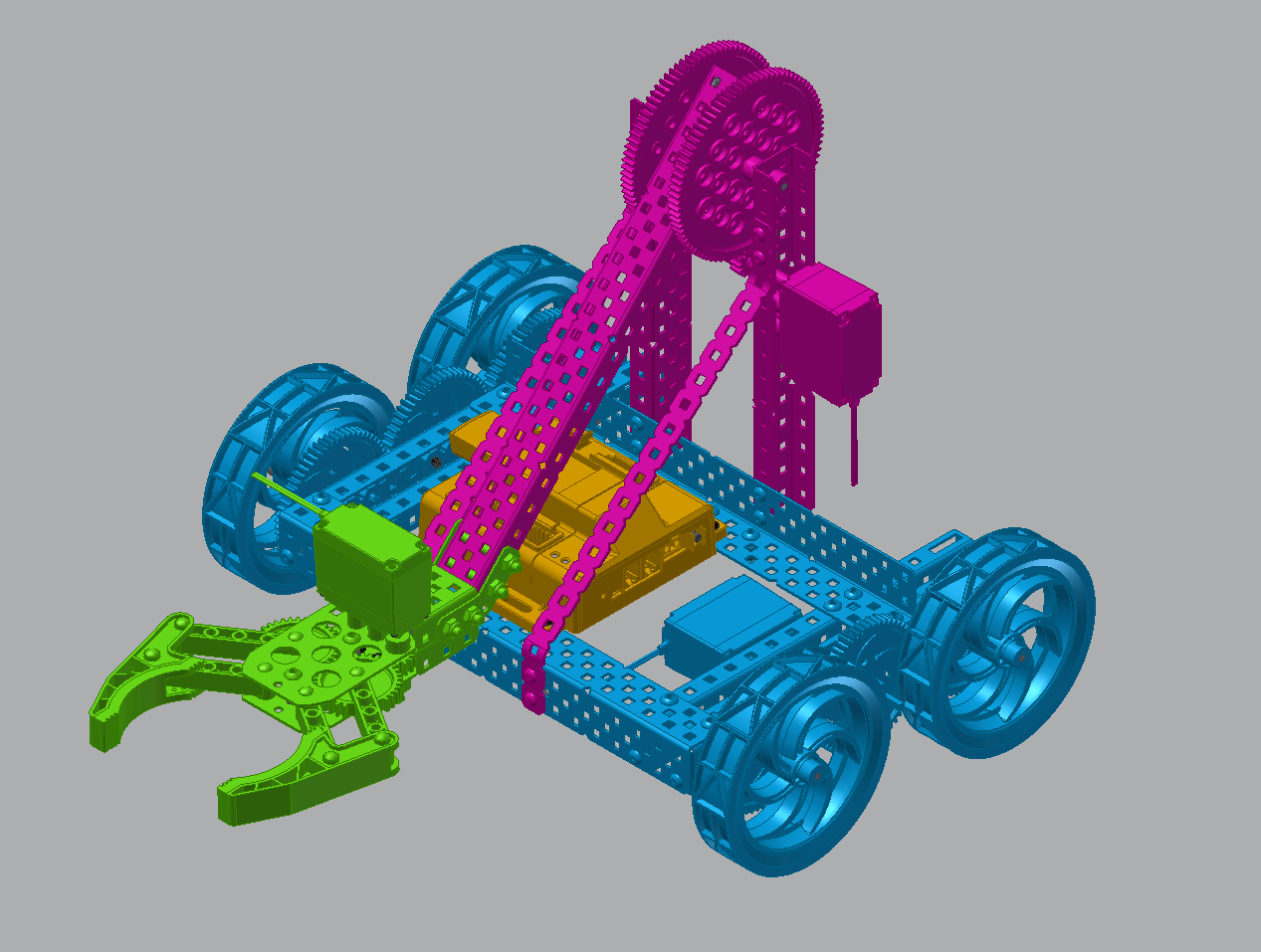
В соревновательной робототехнике, конструкция робота обычно делится на определенные подсистемы, выполняющие различные функции. Некоторые подсистемы интегрированы в каждый элемент робота, другие представляют собой отдельные механизмы. Примерный перечень подсистем представлен ниже:
- Мощность
- Управление
- Датчики
- Пневматика
- Ходовая часть
- Подъемный механизм
- Объектный манипулятор
Каждая из указанных подсистем может быть спроектирована отдельно, но каждая из них зависит от других подсистем. Чтобы робот мог полноценно и эффективно функционировать, необходима совместная работа всех подсистем. Чтобы спроектировать одну из указанных систем, необходимо обладать знаниями об остальных системах. Для создания каждой из подсистем должен быть применен отдельный процесс проектирования (как часть общего процесса проектирования), при этом любые требования, применяемые к порядку взаимодействия подсистем в общей системе, расцениваются как спецификации (проектные условия), этап 3 процесса проектирования (Блок 1).
Например, если к роботу применяется требование в части максимальных допустимых размеров, необходимо, чтобы все подсистемы были интегрированы таким образом, чтобы целостная система соответствовала данному требованию. В этом случае, для каждой отдельной подсистемы устанавливается допустимый % общего объема робота, а также порядок ее взаимодействия с другими подсистемами. Например, стартовые габариты захвата должны визуально соответствовать коробке объемом 3 х 3 х 5 дюймов, размещенной в передней части робота. Захват располагается на высоте 2 дюймов от поверхности земли и крепится к руке робота через нижнюю заднюю часть воображаемой коробки с помощью определенных отверстий.
Подсказка:
О какой бы подсистеме и ее интегрировании не шла речь, очень важно учитывать следующие моменты. При создании сложных систем всегда необходимо помнить эти важные принципы.
- 1. Рассматривать все возможности модификации отдельных подсистем для усовершенствования функционирования всей системы. Например, проект простой загрузочной воронки в передней части шасси подсистемы ходовой части может способствовать значительному повышению производительности подсистемы собирающего устройства.
2. Попробуйте сократить количество используемых элементов. При возможности, задействуйте одни и те же элементы в нескольких подсистемах.
3. Попробуйте использовать элементы, обеспечивающие выполнение нескольких функций в рамках целостной системы робота.
4. Проектируйте систему таким образом, чтобы ее можно было легко собрать, разобрать и установить.
5. Проектируйте систему таким образом, чтобы в ней было задействовано как можно меньшее количество электромоторов. Попробуйте применить каждый электромотор для решения нескольких задач.
6. Усовершенствуйте общую скорость системы. Зачастую, скорость является мерой эффективности.
Если вы будете помнить эти подсказки, вы сможете создать полностью функциональную систему. Интегрирование систем можно наблюдать в течение всего процесса проектирования робота.