2.2: Система проектирования VEX Robotics
Система проектирования VEX Robotics Design System была разработана компанией Innovation First Inc. и является ведущей образовательной платформой для преподавания робототехники в классе. Система предназначения для развития изобретательности и расширения знаний в области дисциплин STEM с помощью робототехники. VEX предлагает преподавателям и учащимся доступную, продуманную и современную робототехническую систему, пригодную для использования в классной комнате и на игровом поле. Инновационный подход VEX, предусматривающий применение стандартных заготовок и металлических конструкций в сочетании с мощным программируемым микропроцессором, позволяет реализовать бесконечное количество проектных решений.
Помимо изучения научных и инженерных основ, в ходе работы над проектом VEX Robotics учащиеся приобретают навыки работы в команды, лидерства и коллективного поиска решения задач. Преподаватели получают возможность комплектовать занятия в соответствии с потребностями и возможностями учащихся. Доступная платформа VEX быстро расширяется и сегодня применяется на лабораторных занятиях средних и старших классов школ, а также в ВУЗах.
Подсистемы VEX
- Конструкции: Все металлические, крепежные и конструктивные/механические пластиковые части VEX
- Движения: Электромоторы, датчики, передачи, звездочки и цепи, танковые гусеницы и сопряженные элементы
- Мощности: Батареи, зарядные устройства и сопряженные элементы
- Датчиков: Бамперный и ограничительный переключатель, ультразвуковые, линейные датчики, датчики положения вала, потенциометры
- Логики: Микроконтроллер, ШИМ-кабели, наборы для программирования
- Управления: Джойстик, передатчик, ресивер, кристаллы, распределитель сигналов, тетеринговые кабели
Подсистема конструкции
Части подсистемы конструкции VEX формируют базу каждого робота. Эти части являются «скелетом» робота, к которому присоединяются все остальные части. Подсистема включает все основные конструктивные элементы системы проектирования VEX Robotics Design System, все металлические элементы и крепежные детали. Эти элементы, соединяясь вместе, образуют раму робота. Подсистемы конструкции и движения очень тесно взаимосвязаны, они формируют шасси робота.
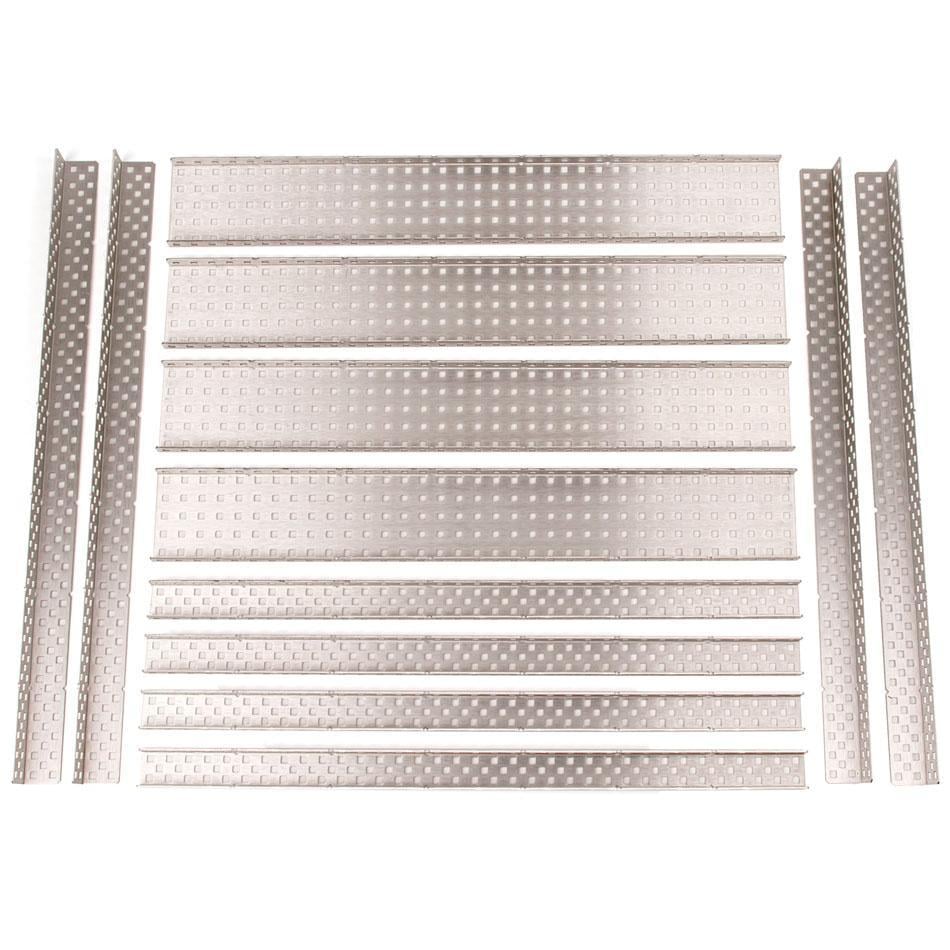
В системе проектирования VEX Robotics Design System, большая часть элементов подсистемы конструкции изготовлено из листовой стали или изогнутого алюминия. Конструктивные элементы выпускаются в различных вариантах форм и размеров и имеют множество применений в конструкции робота.
Все конструктивные элементы имеют квадратные отверстия (0,182 кв. дюйма), распределенные по стандартной сетке 0,5 дюйма. Стандартизированное распределение отверстий позволяет соединять части VEX в практически любой конфигурации. Более мелкие ромбовидные отверстия предназначены для обрезки конструктивных элементов с помощью ножниц или ножовки. При этом не остается острых углов.
Квадратные отверстия VEX также используются для ровного крепления некоторых других компонентов путем их установки в отверстия с помощью защелок. Например, монтаж плоской опоры VEX на металлической конструкции выполняется с помощью ушек, защелкивающихся в квадратных отверстиях и обеспечивающих выравнивание и удерживание элемента на конструкции. Необходимо обратить внимание на то, что даже при такой установке необходимо использование крепежных средств для надежной фиксации плоской опоры на конструктивном элементе!

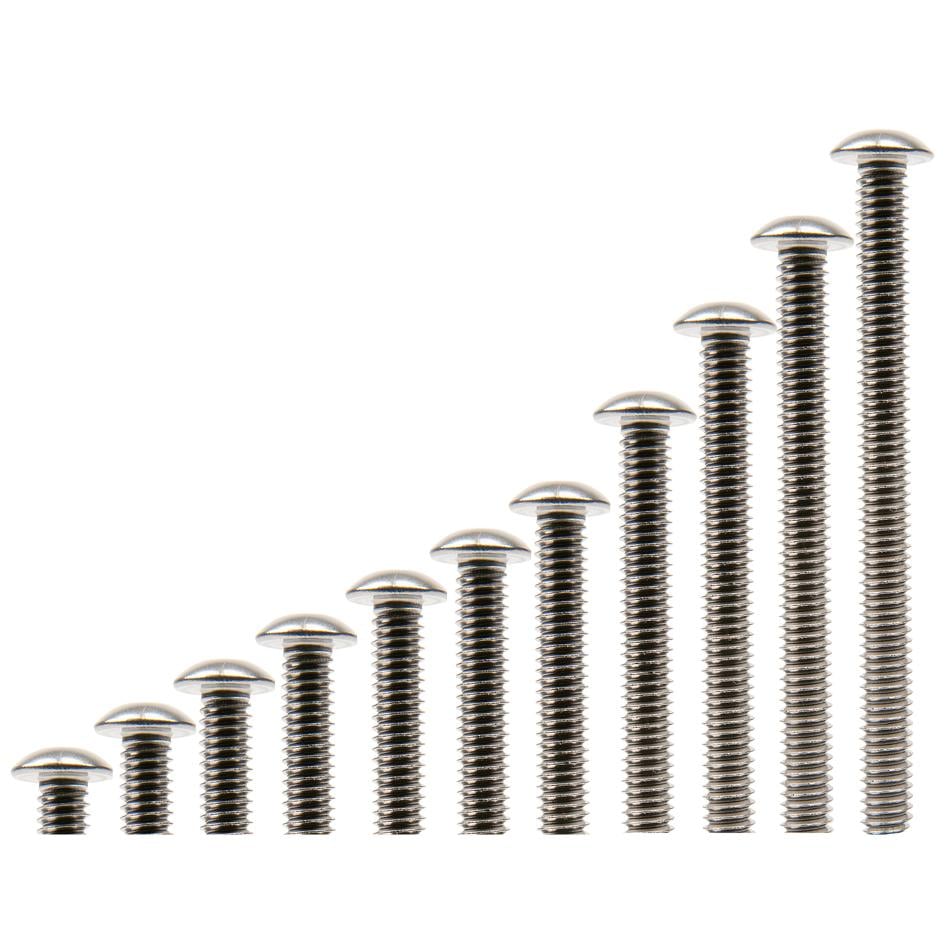
Крепежные средства являются важной частью подсистемы конструкции. Металлические элементы могут быть соединены вместе с помощью винтов 8-32 и гаек, входящих в каждый стандартный набор VEX. Винты выпускаются в различных вариантах длины и могут использоваться для крепления металлических элементов разной толщины, либо для монтажа компонентов других подсистем на конструктивных элементах VEX. Для затяжки и ослабления крепежных элементов применяется торцовый шестигранный ключ. В системе проектирования VEX Robotics Design System также применяются винты 6-32, предназначенные для крепления электромоторов и сервоприводов VEX.

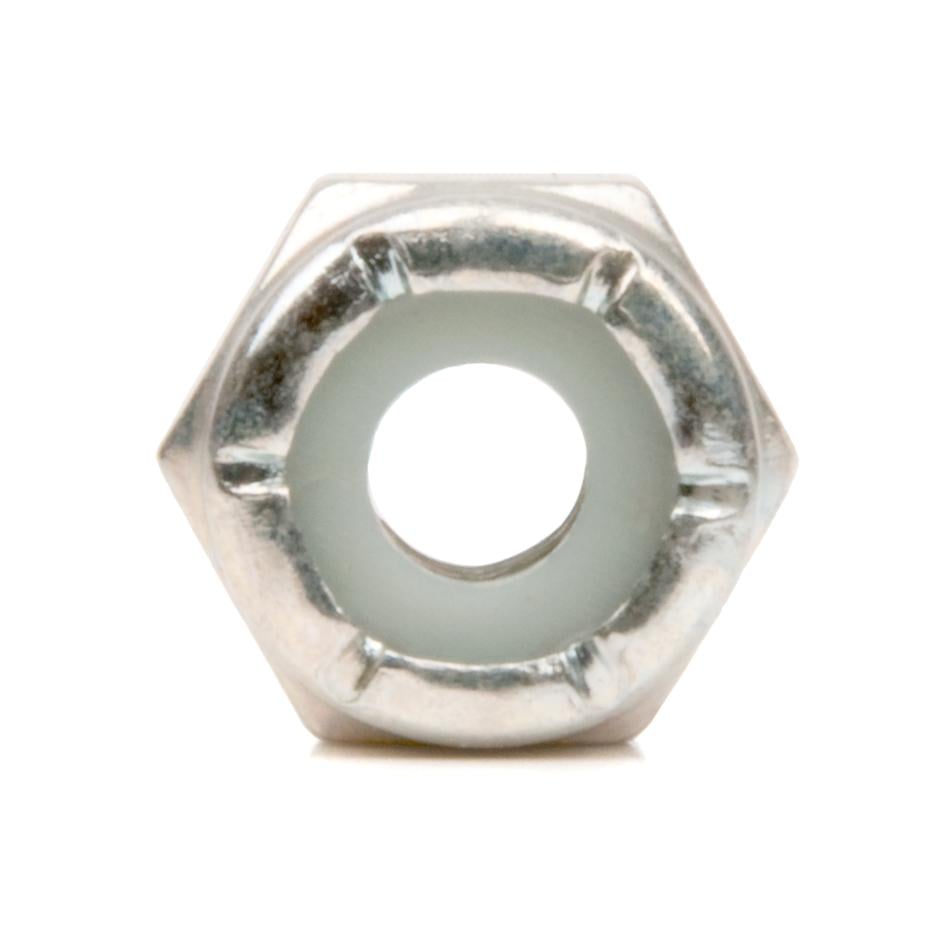
При креплении частей винтами используются гайки трех видов.
- Гайки найлок имеют пластиковую вставку, предотвращающую самопроизвольное ослабление затяжки винта. Эти гайки более сложные в установке, так как для их затяжки требуется рожковый гаечный ключ. Тем не менее, их затяжка не ослабляется при тряске или вибрации во время движения.
- Гайки с предохранительной защелкой с одной стороны снабжены зубцами, зацепляющимися с элементом, на который устанавливаются. Для затяжки этих гаек рекомендуется использовать рожковый гаечный ключ. При установке гайки должны располагаться зубцами к конструкции. При не достаточной силе затяжки они могут самопроизвольно развинчиваться.
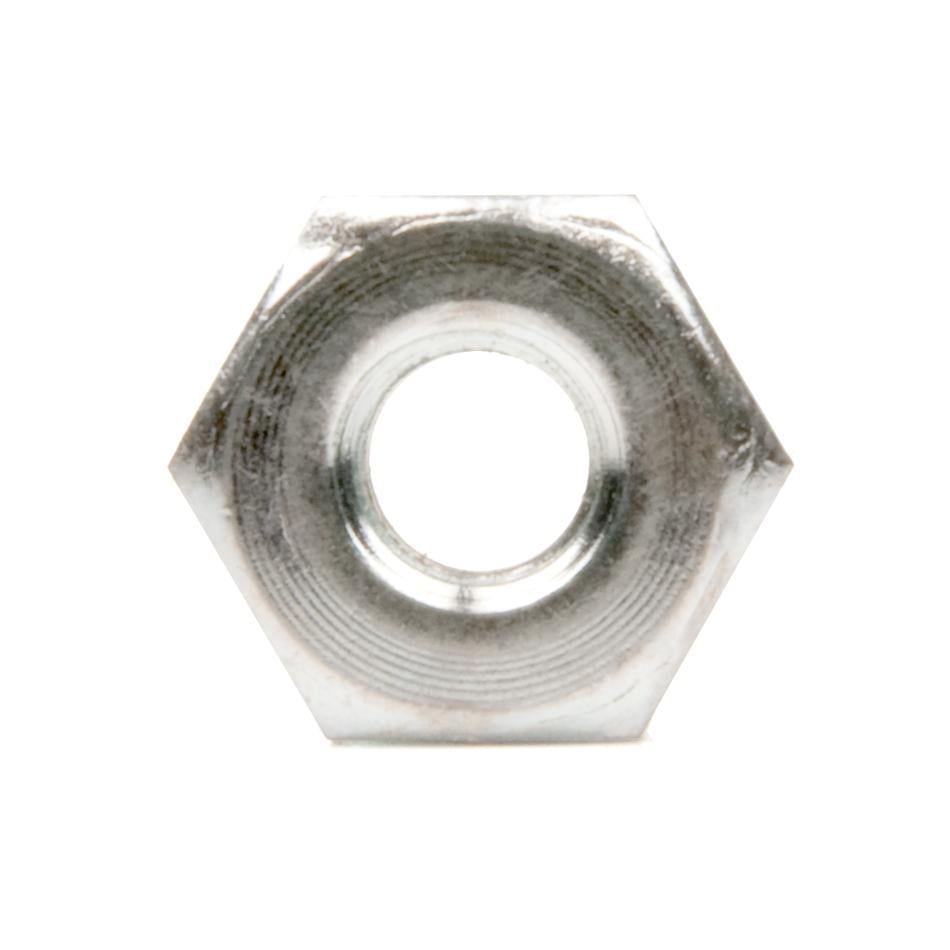
- Стандартные гайки не снабжены замком. Базовые шестигранные гайки устанавливаются с помощью гаечного ключа и со временем могут самопроизвольно развинчиваться, особенно в результате вибрации во время движения. Эти гайки достаточно тонкие и могут использоваться в случаях, где гайки найлок и гайки с предохранительной защелкой не применимы.

Еще одним полезным конструктивным элементом является резьбовой разделитель 8-32. Эти разделители выпускаются в различных вариантах длины и имеют массу применений. Разделители полезны при монтаже компонентов, а также для создания балок большой длины.

Одним из ключевых свойств большинства конструктивных элементов VEX является их гибкость, а также возможность обрезки до нужной длины. Пользователи могут легко модифицировать эти части в соответствии с потребностями проекта. Части предназначены для модификации!
Подсистема движения
Подсистема движения включает все компоненты системы проектирования VEX Robotics Design System, обеспечивающие перемещение робота. Эти компоненты имеют исключительное значение в рамках конструкции робота. Подсистема движения тесно связана с элементами подсистемы конструкции. В системе проектирования VEX Robotics Design System, компоненты движения могут быть легко интегрированы между собой. Это позволяет легко создавать сложные системы с помощью базовых конструкционных блоков подсистемы движения.
Базовой концепцией подсистемы движения является использование квадратных осей. Большая часть элементов движения VEX имеют втулку с квадратной вставкой, за счет чего обеспечивается их надежная установка на квадратной оси VEX. С помощью системы «квадратное отверстие/квадратная ось» осуществляется передача крутящего момента без необходимости применения громоздких воротников или зажимов для удерживания круглого вала.
Квадратная ось имеет скругленные грани, что позволяет использовать ее также в конструкциях с круглыми отверстиями, а также с простыми делриновыми опорами.
Делриновые опоры обеспечивают низкий коэффициент трения оси, которая в них устанавливается.
Эти опоры выпускаются двух типов. Наиболее распространенной из них является плоская опора. Плоская опора монтируется непосредственно на конструктивный элемент VEX и поддерживает ось, проходящую перпендикулярно к конструкции и сквозь нее. Еще один тип опоры - опорный блок, являющийся аналогией промышленного опорного подшипника. Опорный блок монтируется на элемент конструкции и поддерживает ось, установленную на расстоянии выше, ниже или сбоку от опоры. Некоторые опоры монтируются на элементы конструкции VEX с помощью крепежных заклепок. Эти заклепки предназначены для быстрой установки нажатием. Заклепки могут быть удалены и использованы повторно. Для этого необходимо надавить на центральный элемент заклепки снизу, чтобы вытолкнуть головку из элемента конструкции.


Ключевым элементом системы движения является исполнительный механизм (привод - элемент, побуждающий механическую систему к движению). В системе проектирования VEX Robotics Design System, существует несколько вариантов приводов. Наиболее распространенными типами являются электромотор непрерывного вращения VEX и серво VEX. Электромоторы способны непрерывно вращаться, тогда как диапазон вращения серво ограничен 150 градусами. Каждый электромотор или серво VEX имеет в передней части квадратное гнездо, предназначенное для соединения с квадратной осью VEX. Для обеспечения передачи крутящего момента непосредственно к подсистеме движения, необходимо просто вставить ось в гнездо.

Подсистема движения также включает части, предназначенные для фиксации элементов в определенном положении на оси VEX. В их числе: шайбы, прокладки, а также стопорные кольца. Стопорные кольца вала VEX устанавливаются на оси и закрепляются на ней с помощью зажимного винта.
В системе проектирования VEX Robotics Design System, существует несколько путей передачи движения. В наборы для сборки подсистемы движения входят разнообразные сложные элементы, например, цилиндрические, конические зубчатые колеса, цепи и звездочек, а также многое другое.
Подсистема движения VEX также включает различные компоненты, предназначенные для обеспечения мобильности робота. В их числе: колеса, танковые гусеницы и другие варианты.
Подсистема мощности
Мощность - необходимое условие работы все электронных частей робота, в том числе контроллеров и электромоторов. Если подсистема конструкции - это скелет робота, а подсистема движения - его мускулы, то подсистема мощности является циклической системой обеспечения робота энергией.
Существует два важных момента, касающихся питания робота VEX: питание робота и питание джойстика. Для робота предусмотрен комплект батарей 7,2 В. Джойстик VEXnet работает на шести батареях ААА.


Подсистема датчиков
Подсистема датчиков позволяет роботу идентифицировать различные объекты и явления внешней среды. Датчики - это глаза и ушки робота, обеспечивающие его автономную работу, не требующую вмешательства со стороны человека. Робот улавливает изменения внешней среды и изменяет собственное поведение на основании полученных данных. Датчик отправляет роботу отклик на простые события внешней среды, интерпретация которых производится программой робота, после чего программа определяет вариант реакции.
В системе проектирования VEX Robotics Design System существует множество датчиков. Это и ультразвуковые дальномеры, гироскопические датчики, световые и оптические датчики и многие другие.

Подсистема логики
Главным элементом подсистемы логики является микроконтроллер VEX. Микроконтроллер - это центральный компонент элемент всей системы VEX, так как с его помощью производится координирование работы подсистем и управление всеми компонентами. Подсистема логики - это мозг робота.

Микроконтроллер VEX Cortex выпускается с исходным программным обеспечением, благодаря чему пользователи могут использовать его сразу после приобретения. Возможно выполнение быстрой настройки исходного кода с помощью перемычек контактов. Для расширения возможностей управления может использоваться пользовательский программный код.
Подсистема управления
Подсистема управления позволяет вручную управлять действиями робота. Отправка команд осуществляется с помощью ручек управления и кнопок джойстика VEXnet по беспроводному соединению. Таким образом, управление роботом может осуществляться как ручным, так и автономным методами.
Джойстик VEXnet позволяет оператору управлять действиями робота в режиме реального времени через инновационное беспроводное соединение VEXnet. Джойстик снабжен двумя аналоговыми ручками, работающими в двух направлениях, четырьмя пусковыми кнопками и двумя навигационными панелями с четырьмя кнопками.
