10.3: Вращающиеся соединения
Наиболее часто используемым в соревновательной робототехнике типом подъемного механизма является вращающееся соединение.
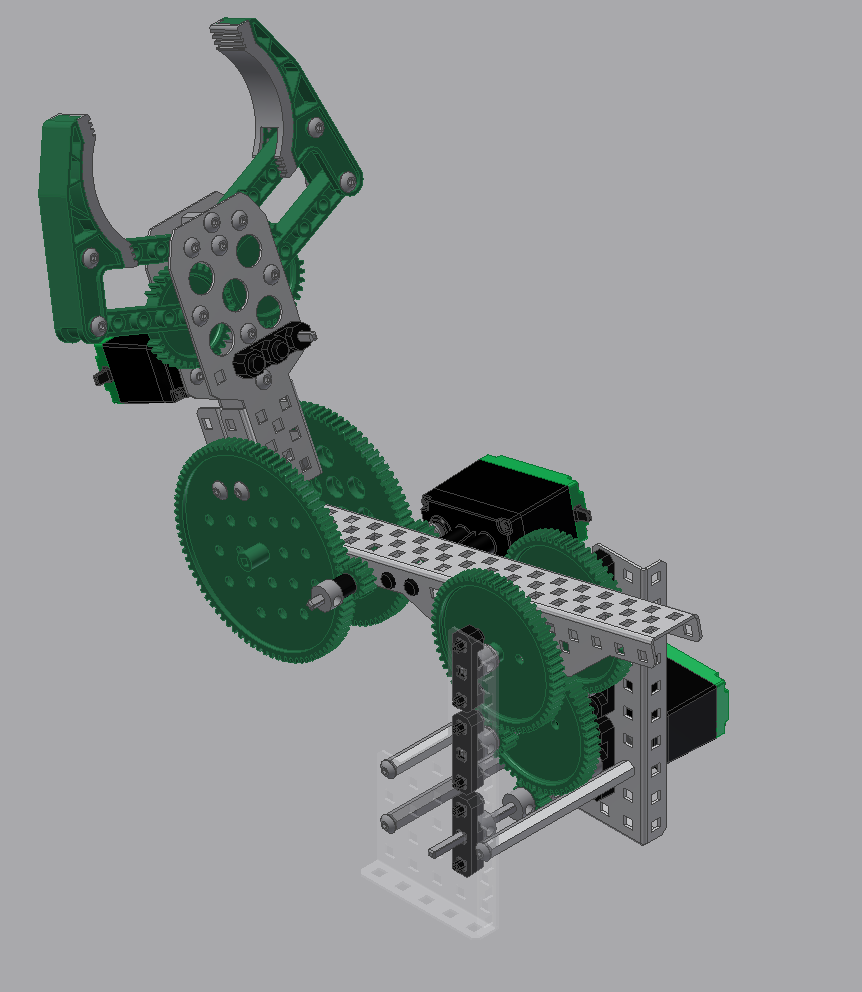
В примере выше представлена рука, состоящая из двух соединений, плечевого и кистевого (соединения руки робота очень часто получают названия на основании аналогии с человеческой рукой). Эти соединения конструируются методом фиксации части конструкции робота на подвижную систему робота. Как показано в примере выше, плечевое соединение руки содержит руку, установленную на шестерни плечевой коробки передач - при повороте шестерен, рука также поворачивается. По аналогии, клешни устанавливаются на шестернях коробки передач, присоединенной к кончику руки.
Из примера, представленного выше, видно, что плечевое соединение имеет гораздо большее передаточное число, чем кистевое соединение. Данное решение спровоцировано нагрузкой на электромотор. Плечевое соединение должно поднимать массу руки, массу соединения запястья, массу захвата и также объекта, который захват будет удерживать. Кистевое соединение должно поднимать только массу захвата и объекта в нем. Плечевое соединение должно поднимать массу с учетом рычага гораздо большей длины по сравнению с кистевым соединением, поэтому оно работает при гораздо большем крутящем моменте. Каждое соединение предназначено для работы под определенной нагрузкой. Эти концепции обсуждались в блоках 7 и 8.
Ниже приводится пример двухступенчатой редукции вращающегося соединения.
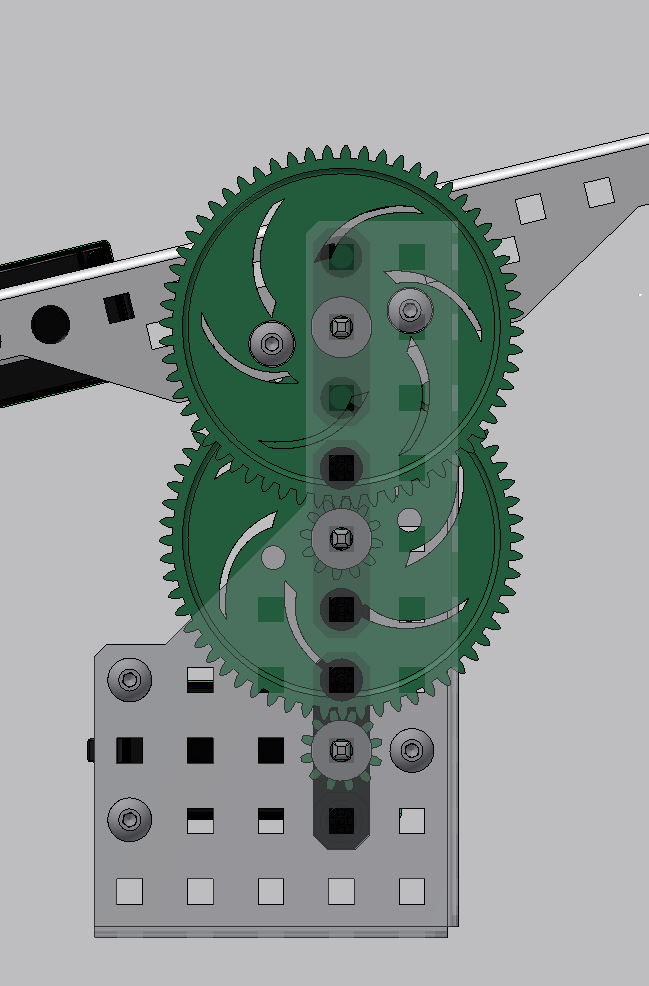
Это соединение имеет две ступени редукции 12:60. Вторая ступень присоединяется непосредственно к руке робота. Вторая ступень также имеет две одинаковые передачи, работающие параллельно. Это означает, что нагрузка распределяется равномерно между этими двумя комплектами шестерен. Путем уменьшения нагрузки на отдельные элементы уменьшается вероятность возникновения сбоя (поломка шестерен и пр.).
УДАРНАЯ НАГРУЗКА - это внезапный всплеск нагрузки на механическую систему. Допустим, кто-то схватил робота за руку и резко дернул ее вниз со всей силы. Это действие вызывает ударную нагрузку на коробку передач руки. Поэтому необходимо обеспечивать достаточную прочность подвижных соединений робота, способных противостоять ударным нагрузкам. Использование нескольких параллельных редукторов позволяет распределить ударную нагрузку и предотвратить возникновение ущерба.
В первую ступень НЕ входят параллельные передачи. Здесь используется один комплект зацепляющихся шестерен. Данное решение продиктовано тем, что воздействие ударной нагрузки наиболее слабое на ту часть коробки передач, которая расположена ближе к электромотору. Как правило, ступени передачи, расположенные ближе всего к электромотору, не требуют применения усиленной конструкции, которая необходима для остальных ступеней, расположенных глубже в коробке передач.
Нагружение подвижного соединения:
Для эффективного использования электромотора необходимо установить такую нагрузку на него, чтобы обеспечить его работу в пределах допустимых значений параметров. Методы применения механического преимущества и передаточного числа для оптимизации нагружения электромотора обсуждались в блоках 7 и 8.
Если к руке робота приложена определенная сила (как обсуждалось в Блоке 7), на подвижное соединение будет действовать крутящий момент, равный величине силы, умноженной на удаленность точки ее приложения от данного соединения. Действие этой силы, как правило, вызвано массой самой руки, а также любыми силами, участвующими в выполнения рукой различных операций (массой поднимаемых объектов и пр.).
При выборе соответствующего передаточного числа для конструкции руки, необходимо принимать во внимание коэффициент запаса прочности с учетом действующих сил, чтобы обеспечить способность соединения противостоять непредвиденным нагрузкам. Коэффициент запаса прочности, также известный как запас надежности, описывает объем превышенной нагрузки, которую может выдерживать система. Если робот должен выполнять операцию подъема с силой, равной 10 Н, расчетное требование для проекта в этой части можно установить, как равное значению 12 Н. За счет этого будет обеспечен коэффициент запаса прочности 1,2 (10 * 1.2 = 12). Коэффициент запаса прочности компенсирует любые непредвиденные нагрузки на руку. Всегда полезно включить в проект расчет на непредвиденные обстоятельства.
Скорость подвижного соединения:
Зачастую очень важно обеспечить максимальную скорость движения соединения. Тем не менее, данное решение не всегда может быть реализовано. Для управления рукой, обладающей большой скоростью, может потребоваться использование специального усовершенствованного программного обеспечения.
Существует два подхода к выбору передаточного числа, необходимого для конкретного вращающегося соединения. Каждый из них может быть применен к любому проекту вращающегося соединения. Если критическим параметром является количество нагрузки, которую может поднять соединение, применяется подход 1. Если скорость соединения представляет большее значение по сравнению с нагрузкой, проектировщики используют подход 2.
Подход 1 - Начать с нагрузки:
Этап 1 - Определить нагрузку на конец руки, а также длину руки.
Этап 2 - Определить максимальную нагрузку, которую может выдержать электромотор. (См. Блок 7).
Этап 3 - Определить требуемое передаточное число на основании предполагаемой нагрузки на электромотор.
Этап 4 - Рассчитать, с какой скоростью будет вращаться рука при этом передаточном числе.
Этап 5 - Определить, является ли эта скорость приемлемой.
Этап 6а - Если да, приступить к сборке.
Этап 6б - Если скорость превышает допустимую, определить требуемую скорость соединения, затем рассчитать необходимую для ее реализации передачу (значение скорости должно быть меньше предыдущего рассчитанного значения). Затем приступить к сборке.
Этап 6в - Если скорость оказалась слишком низкой, добавить мощности в систему таким образом, чтобы она смогла управлять заданной нагрузкой с учетом большего значения скорости (установить в соединение дополнительные электромоторы). Затем пересчитать.
Этап 6г - Если полученные результаты не оправдали ожиданий, необходимо переоценить ограничения, принятые для системы, и изменить проект.
Подход 2 - Начать со скорости:
Этап 1 - Определить требуемую скорость соединения, например, 90 градусов в секунду.
Этап 2 - Определить требуемое передаточное число для получения желаемой скорости. (См. Блок 8).
Этап 3 - Определить максимальную нагрузку, которую может выдержать электромотор. (См. Блок 7).
Этап 4 - Определить максимальную нагрузку, которую будет поднимать рука, на базе передаточного числа (Этап 2) и максимальной нагрузки на электромотор (Этап 3).
Этап 5 - На основе расчетных данных, определить, является ли эта максимальная подъемная нагрузка приемлемой (с учетом коэффициента запаса прочности).
Этап 6а - Если да, приступить к сборке.
Этап 6б - Если нагрузка слишком низкая, и проектировщик хочет уменьшить скорость соединения для работы с этой нагрузкой, необходимо изменить проект, применив подход 1.
Этап 6в - Если нагрузка слишком низкая, но проектировщик НЕ хочет уменьшать скорость соединения, необходимо добавить мощности в соединение и затем пересчитать значения параметров.
Примечание: нагрузка на электромотор может быть уменьшена за счет уменьшения длины руки, установленной на соединении (см. Блок 7). Это один из вариантов, который проектировщик может выбрать, если результаты не соответствуют ожиданиям.
Оба подхода одинаково эффективны при проектировании вращающегося соединения. Для достижения успеха, каждый процесс требует итерации, поэтому в процессе поиска идеального решения конкретной задачи проектировщики зачастую вынуждены выполнять расчеты по несколько раз.