10.4: Подъемники
Еще одним подъемным механизмом, часто используемым в соревновательной робототехнике, является линейный подъемник.
В системе проектирования VEX Robotics Design System существует несколько методов создания механизмов вращения и вращающихся соединений с низким коэффициентом трения, но создание линейного движения с низким коэффициентом трения может осуществляться всего несколькими способами. В результате, в проектах соревновательных роботов данный тип механизма встречается значительно реже, чем вращающееся соединение. Тем не менее, он обладает рядом преимуществ.
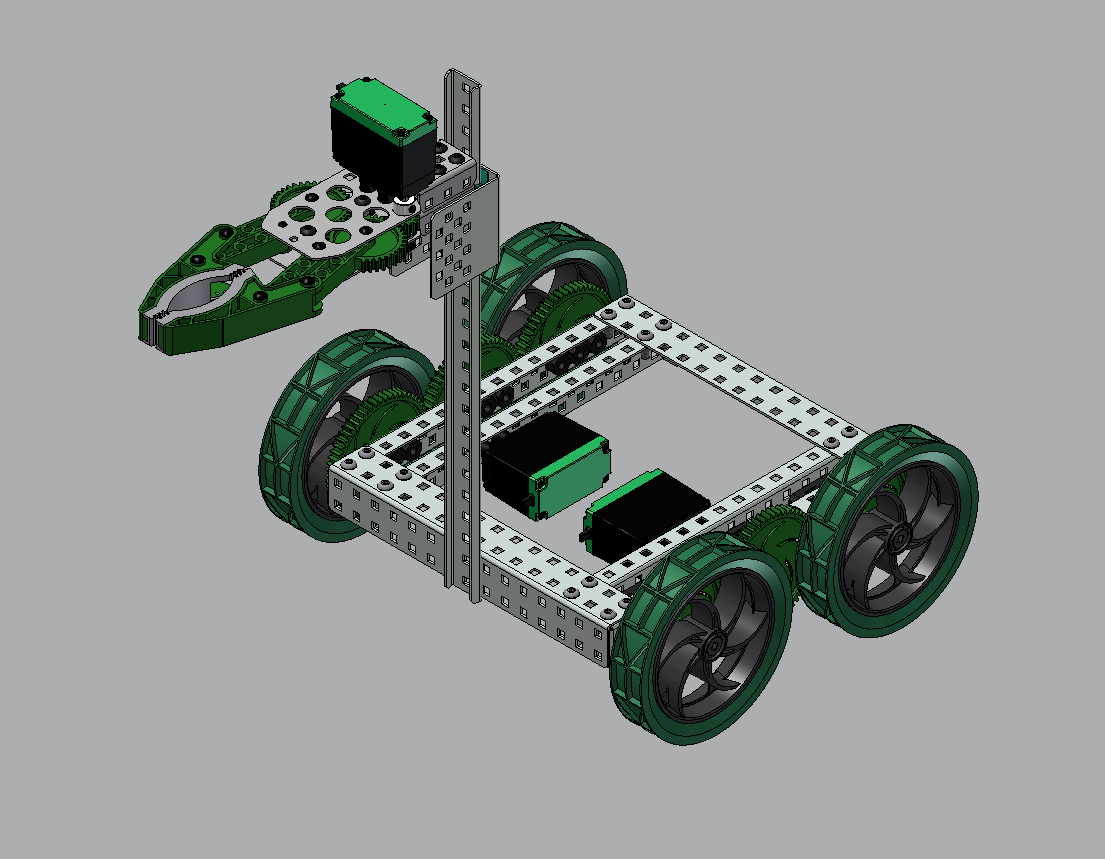
Как видно из примера ниже, при подъеме вращающегося соединения вверх, захват робота будет двигаться по дуге относительно точки вращения. Это означает, что расстояние между захватом и ходовой базой может различаться в зависимости от высоты, на которой располагается захват. Если оператор хочет, чтобы робот мог забрасывать игровые объекты в ворота, расположенные на различной высоте, он должен правильно рассчитать расстояние, на котором должен находиться робот от каждых из этих ворот.
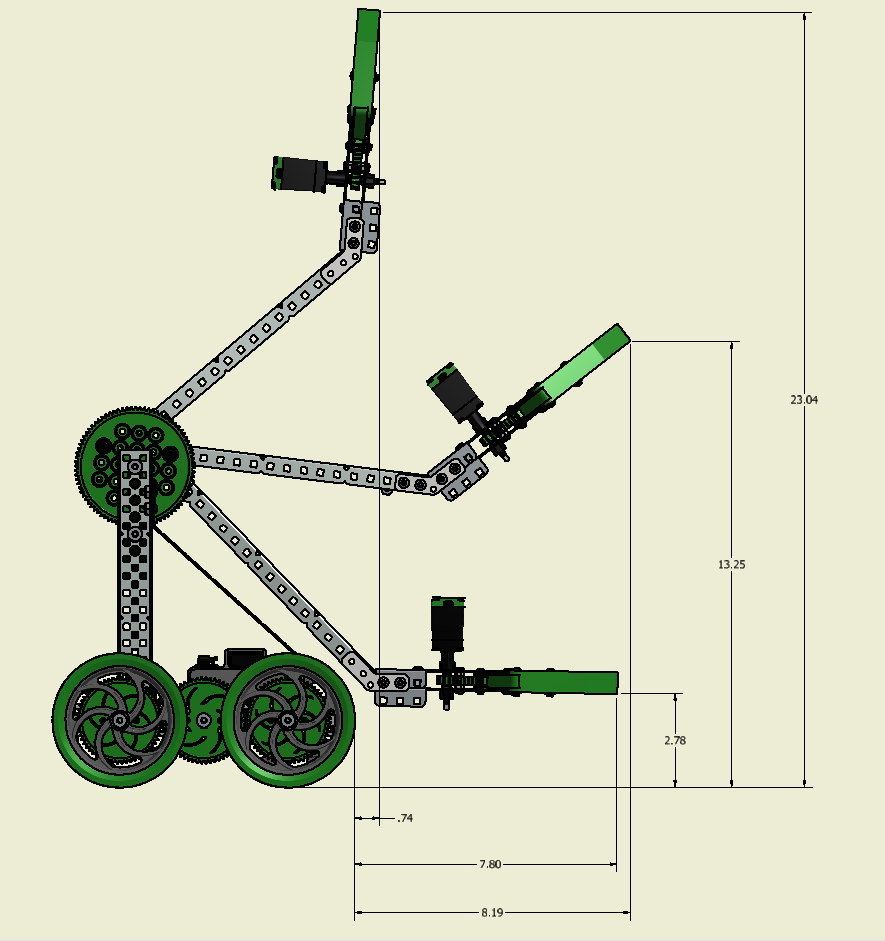
Захват, установленный на линейном подъемнике, всегда находится на определенном расстоянии от ходовой базы, поэтому, вне зависимости от высоты ворот, оператор должен удостоверить наличие того же расстояния между роботом и воротами.
Еще одно отличие подъемника от вращающегося соединения заключается в способе изменения ориентации объекта. Во вращающемся соединении, рука изменяет ориентацию в процессе подъема соединения. Линейный подъемник не изменяет ориентацию объекта при подъеме.
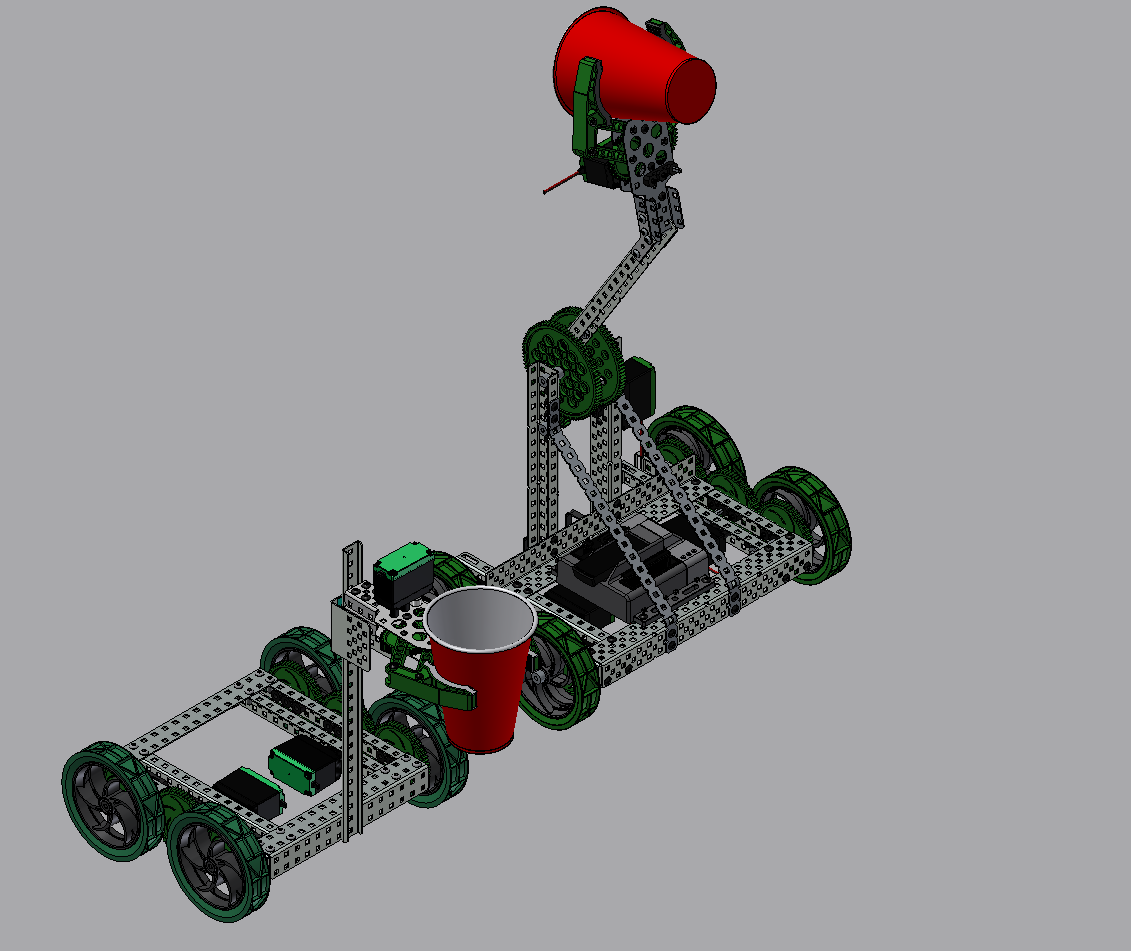
Из примера, представленного выше, видно, что вращающееся соединение наклоняет стакан при подъеме! Подъемник поднимает стакан строго вверх.
Приведение в действие (запуск) и нагружение подъемника:
Процедуры приведения в действие линейного подъемника и вращающегося соединения различаются. Для управления движением подъемника, вращательное движение электромотора должно быть преобразовано в линейное движение. Данная задача может быть решена несколькими способами.

В примере выше представлен механизм реечной передачи, используемый для управления движением подъемника. Зубчатое колесо рейки вращается с определенной скоростью при некотором крутящем моменте. Этот крутящий момент создает линейную силу на делительной окружности зубчатого колеса, которая приводит в действие механизм.

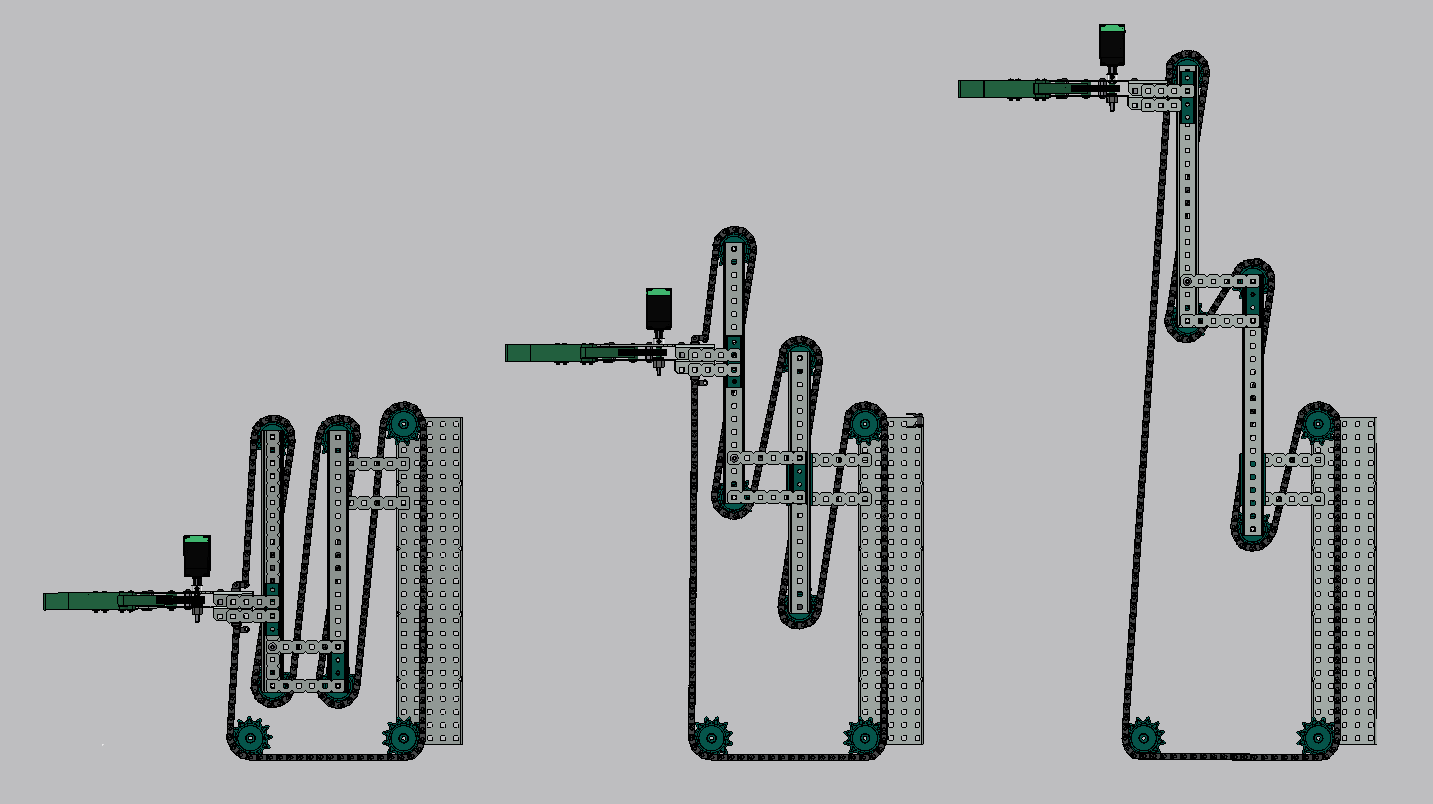
На рисунке выше представлена система, состоящая из цепи и звездочек, которая также может быть использована для приведения в действие линейного подъемника. Крутящий момент на ведущей звездочке вращает цепь. Цепь присоединяется к линейному подъемнику, механизм которого приводится в действие за счет созданной линейной силы.

Из примера, представленного выше, видно, что для приведения в действие линейного подъемника может также использоваться лебедка. Электромотор прикладывает крутящий момент к лебедке, которая, в свою очередь, прикладывает линейную силу вдоль троса, за счет чего приводит в действие механизм.
Многоступенчатые подъемники:
Одноступенчатые подъемники способны поднимать объекты на высоту, равную одной своей длине. Это означает, что если высота подъемника равна одному метру, он сможет поднять захват на высоту, не превышающую одного метра. Тем не менее, существуют методы конструирования многоступенчатых механизмов. Многоступенчатый механизм может быть собран путем установки нескольких линейных подъемников друг на друга. Применение этого метода позволяет реализовать любую высоту подъема.