10.2: Степени подвижности
Степень подвижности относится к способности объектов перемещаться в одном независимом направлении. Способность к перемещению в нескольких направлениях означает обладание несколькими степенями подвижности. Перемещение вверх и вниз - одна степень подвижности, перемещение вправо и влево - другая; механизмы, способные перемещаться во всех вышеперечисленных направлениях обладают ДВУМЯ степенями подвижности. Эти основные виды степеней подвижности будут обсуждаться в контексте соревновательной робототехники.
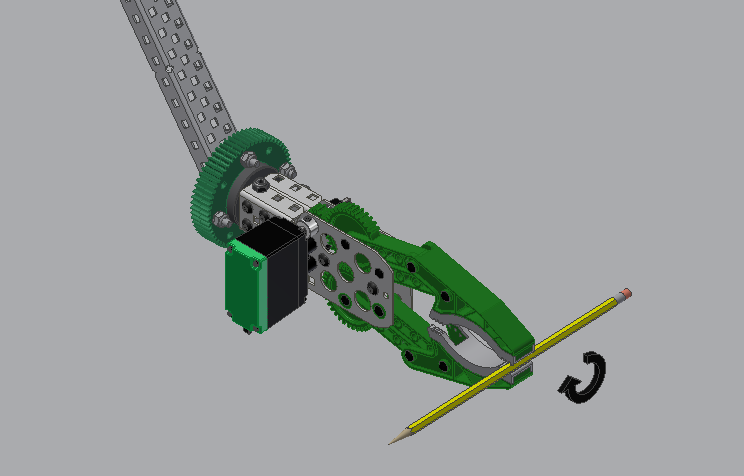
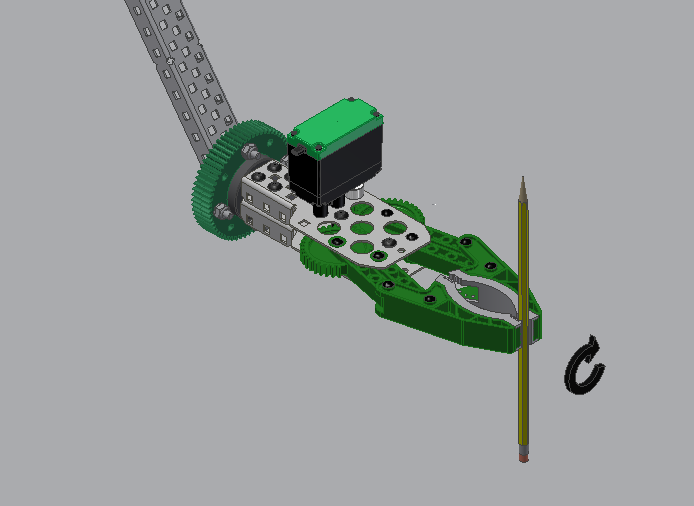
Степень подвижности первого типа обеспечивает способность руки робота вращаться вокруг оси, расположенной параллельно руке. Данной степенью подвижности обладает запястье человеческой руки. Если человек удерживает в руке карандаш, то этот карандаш располагается параллельно полу, то есть горизонтально. Теперь этот же человек повернул запястье таким образом, чтобы карандаш был направлен прямо вверх, то есть вертикально, в потолок. Этот поворот является степенью подвижности.
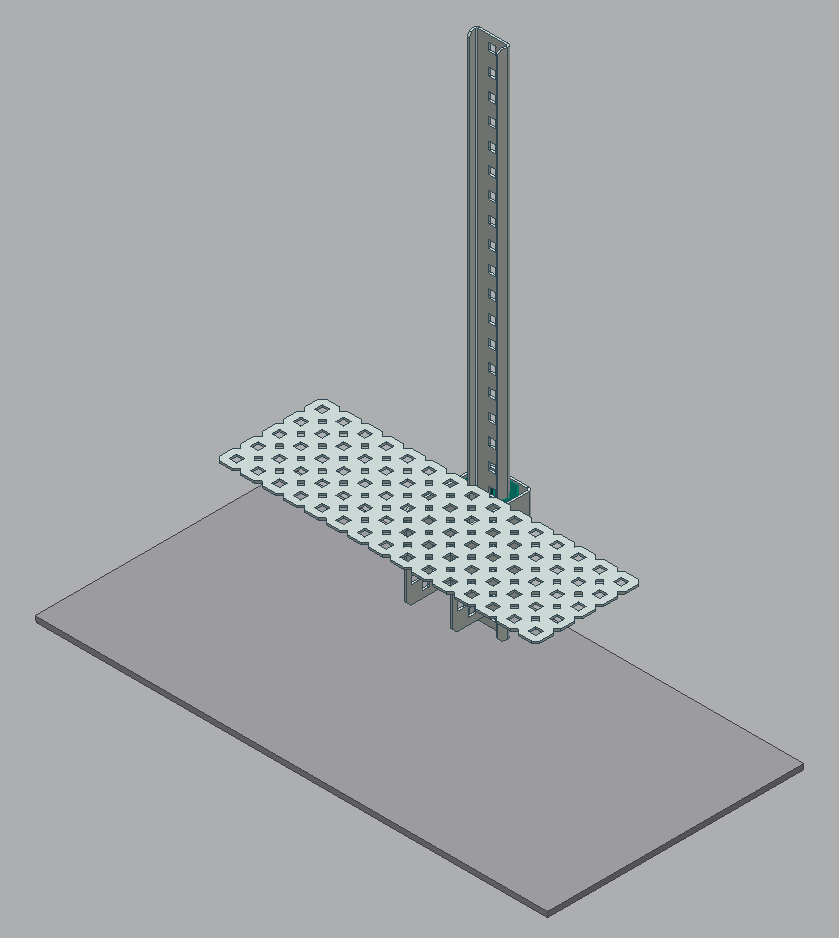
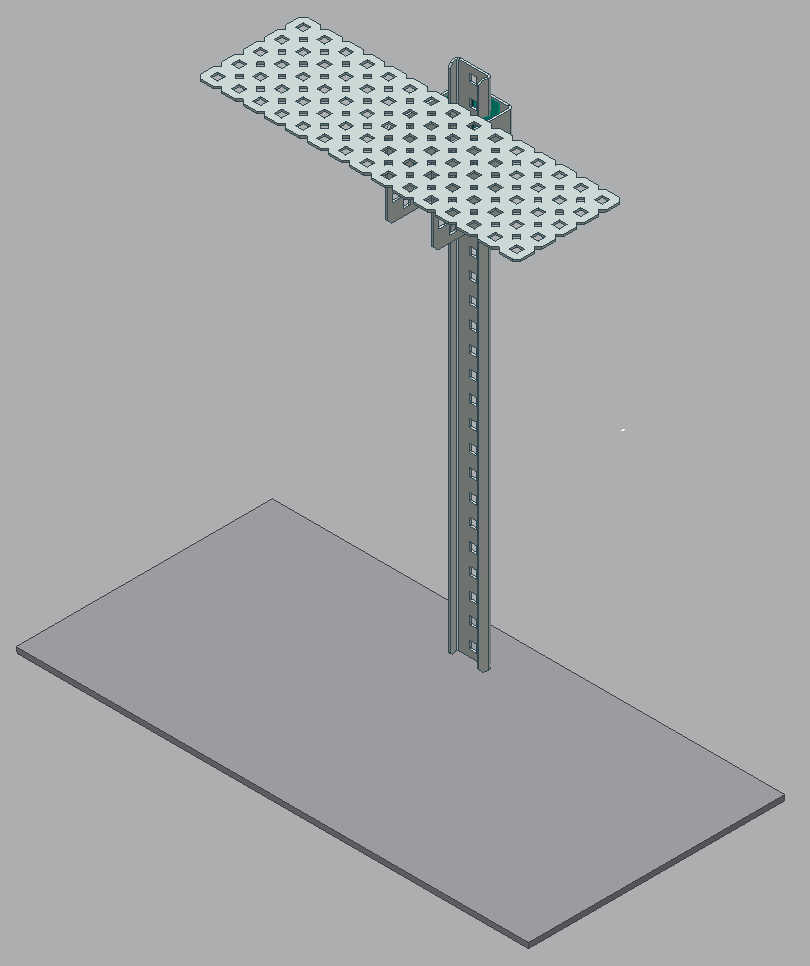
Степень подвижности второго типа выражается в линейном движении. В этом случае, элемент робота может скользить внутрь и наружу (или вверх и вниз, или вправо и влево). Линейную степень подвижности хорошо иллюстрирует подъемник (двигающийся вверх и вниз), а также ящик письменного стола (двигающийся внутрь и наружу).

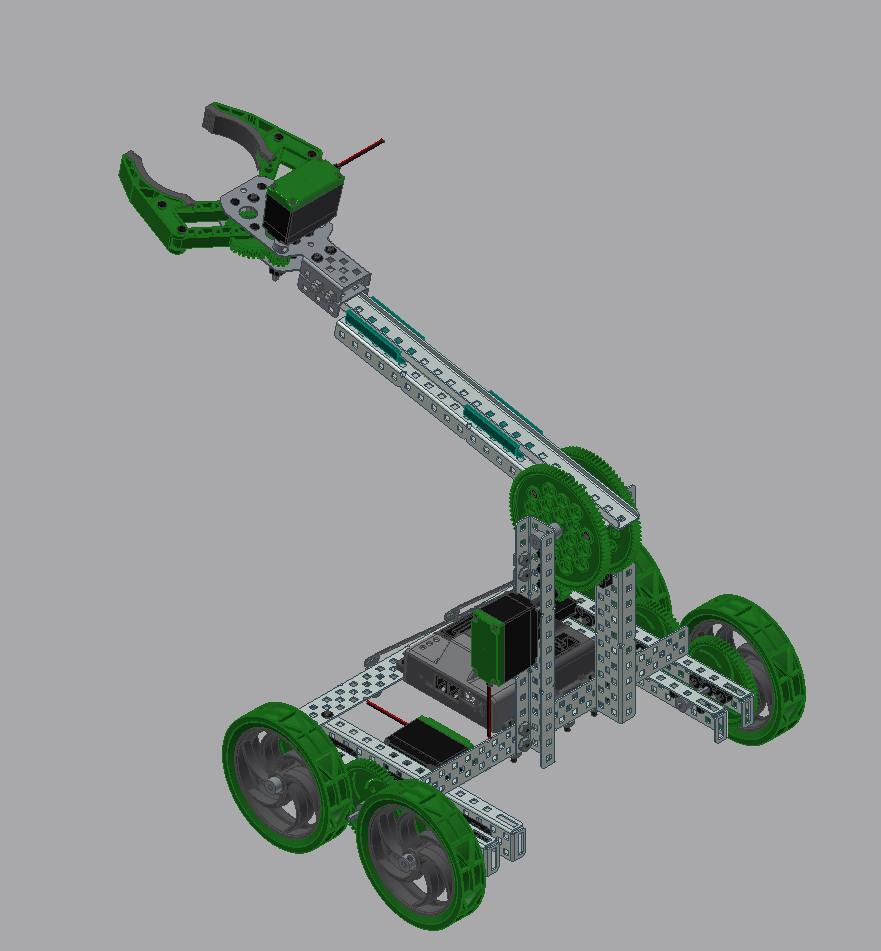
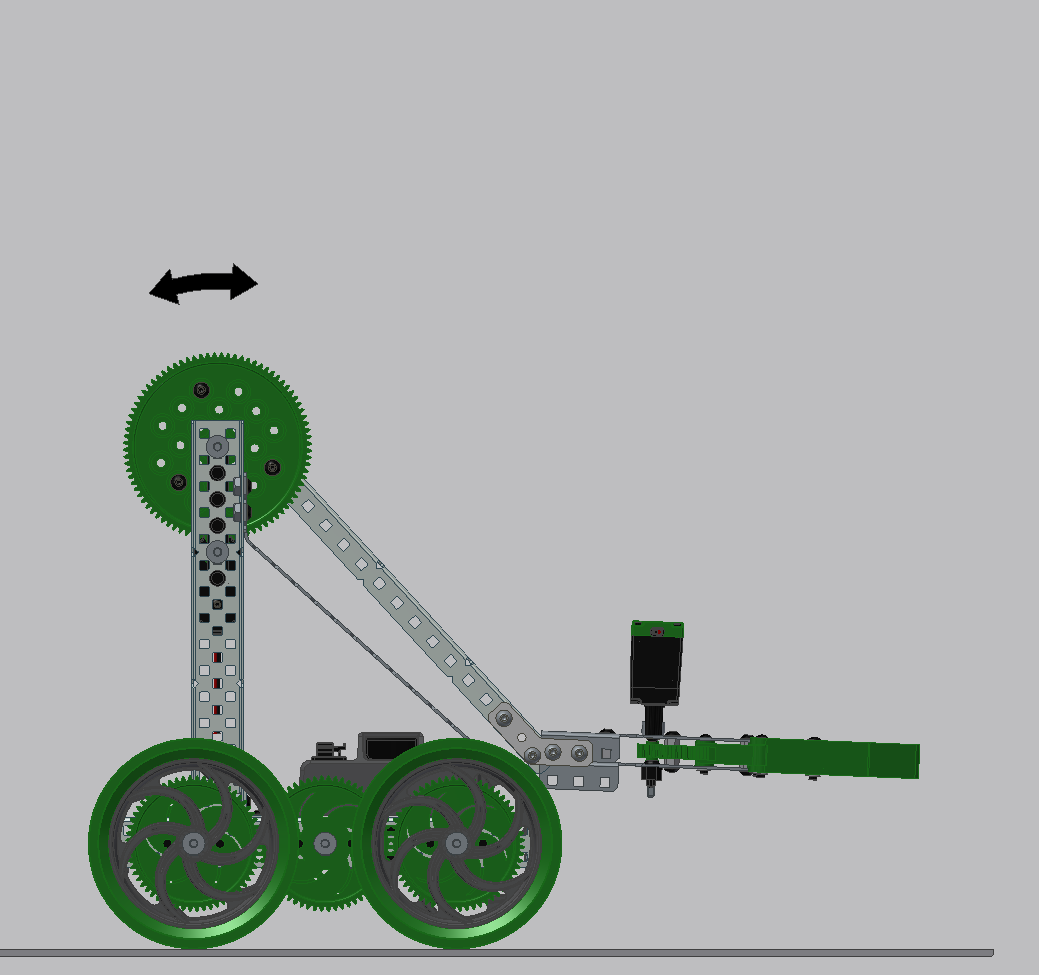
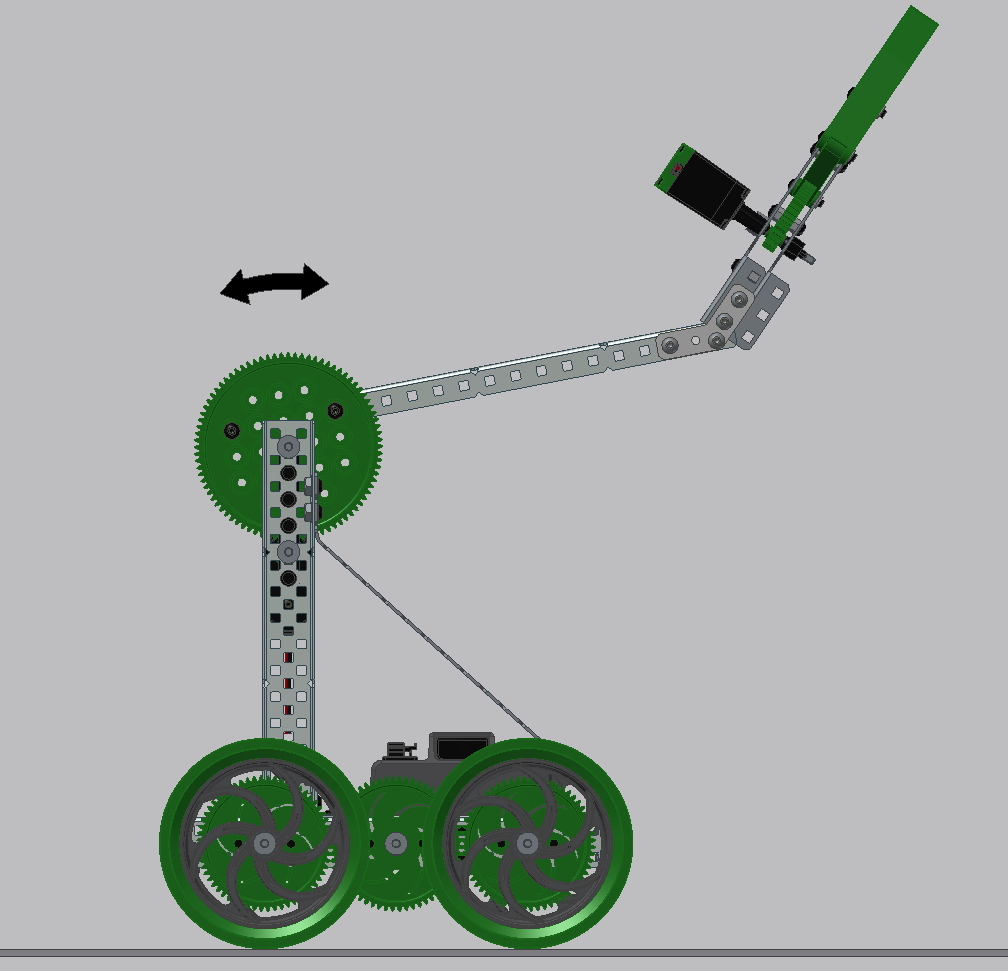
Степень подвижности третьего типа обеспечивает вращение вокруг оси, расположенной перпендикулярно руке. Примером соединения, обладающего этой степенью подвижности, является плечо человека. Системы «рука-масса», речь о которых велась в блоках 7 и 8, также являются примерами этой степени подвижности.
Упражнение: Учащиеся должны попытаться определить количество степеней подвижности руки человека. Подсказка: некоторые подвижные соединения обладают несколькими степенями подвижности!
В конструкции соревновательного робота обычно применяется несколько степеней подвижности, так как для целей соревнований не требуется точное повторение строения человеческой руки. Речь о наиболее успешных проектах подъемных механизмов соревновательных роботов пойдет позднее в настоящем блоке.