9.3: Терминология ходовых частей
Ниже приводится терминология, необходимая учащимся в процессе изучения различных типов ходовых частей.
ВЕДУЩЕЕ КОЛЕСО – колесо, мощность которого передается и используется для продвижения робота вперед. Не все колеса являются ведущими, некоторые колеса не используются для создания движения робота.
ТОЧКА ПОВОРОТА – точка, вокруг которой поворачивается робот.
ПОВОРОТНЫЙ СКРАБ – трение, создаваемое колесами при их боковом волочении по окружности в процессе поворота робота. Поворотный скраб сопротивляется повороту робота.
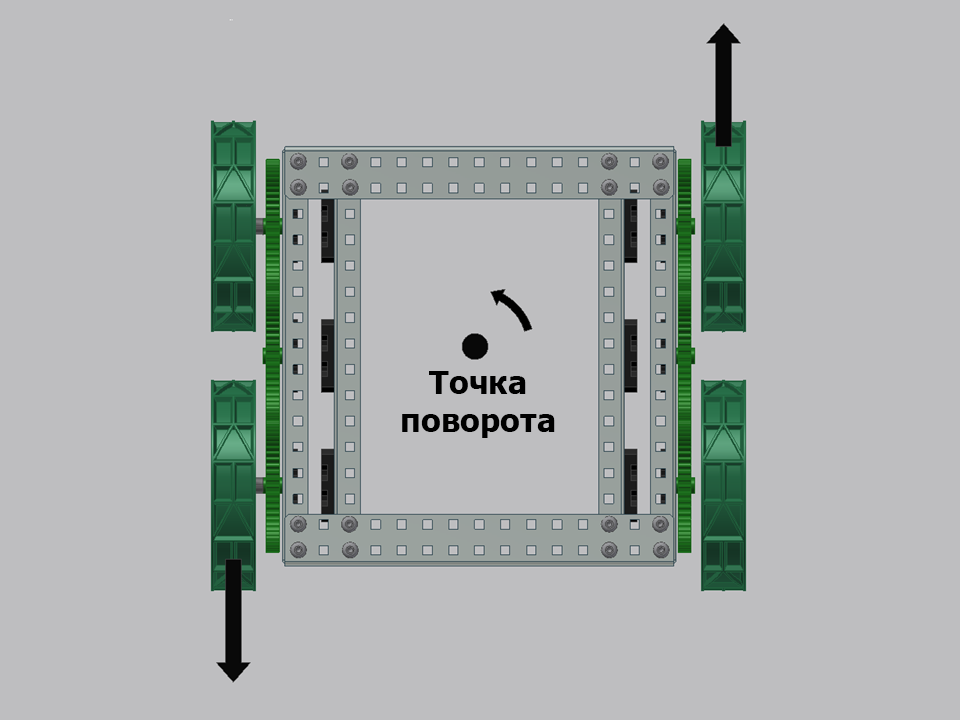
ПОВОРОТ НУЛЕВОГО РАДИУСА – поворот, когда робот поворачивается на месте, не продвигаясь при этом вперед. При выполнении поворота нулевого радиуса, точка поворота находится в центре робота.
ШАССИ – конструкция робота, удерживающая колеса, электромоторы и зубчатые механизмы на месте.
ТИПЫ ХОДОВЫХ ЧАСТЕЙ:
В робототехнике используется ряд ходовых частей различных типов. Все они имеют преимущества и недостатки. Ниже описываются наиболее распространенные из них.
Рулевое управление Аккермана:
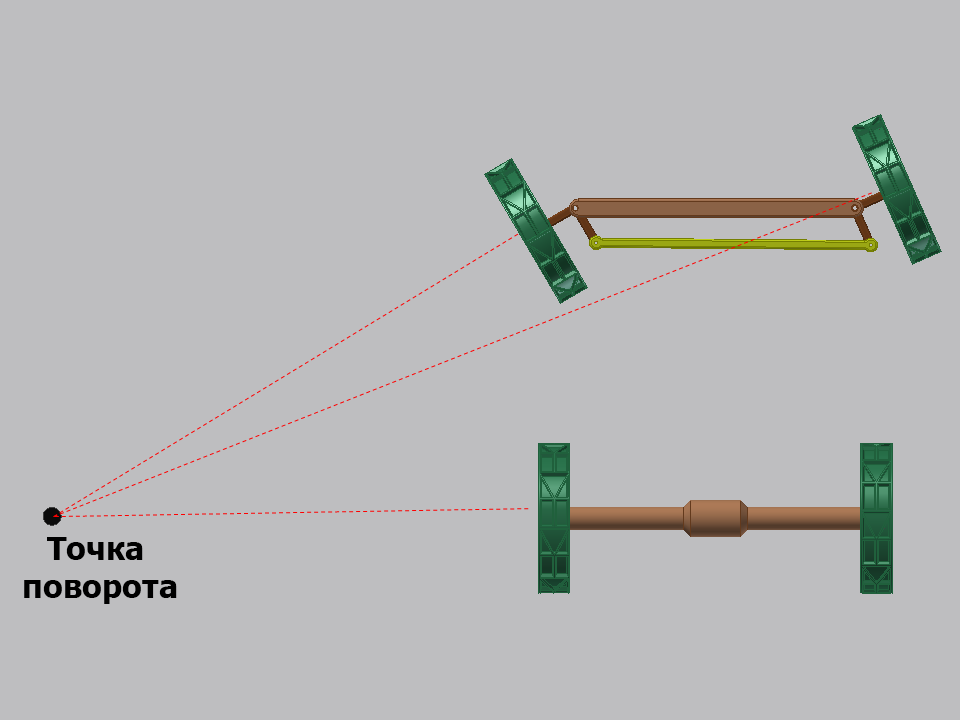
В приводе этого типа все колеса перемещаются в одном направлении: вперед или назад. Управление осуществляется путем поворота колес таким образом, что все колеса располагаются по дуге вокруг одной точки поворота (turning point).
Одним из преимуществ этой конфигурации является отсутствие поворотного скраба. Тем не менее, главный недостаток заключается в неспособности выполнять поворот нулевого радиуса.
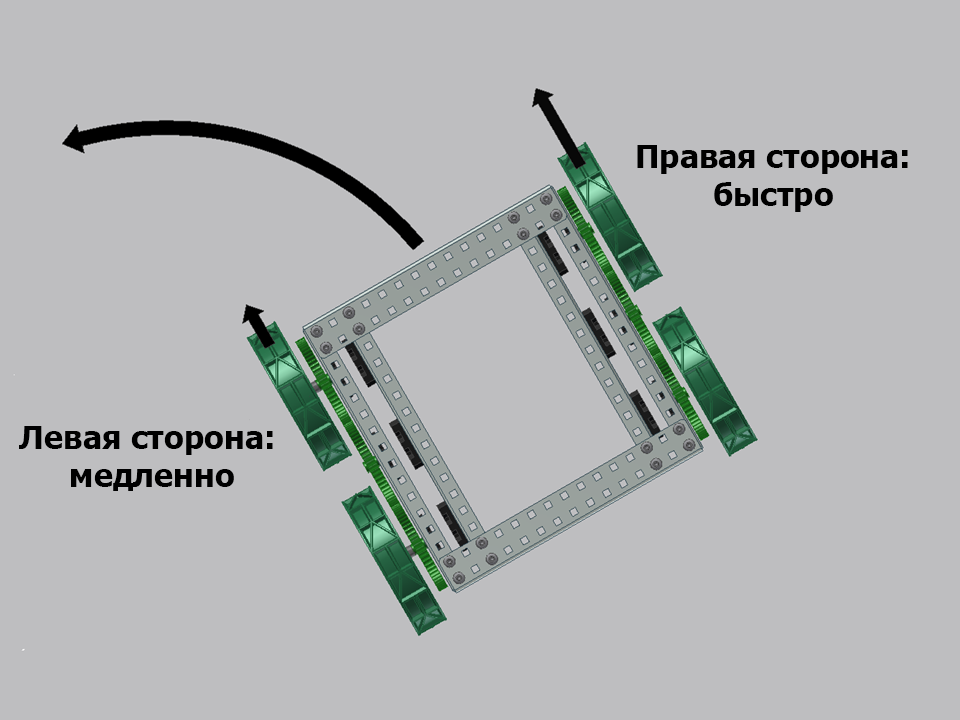
Однобортное управление:
Это наиболее распространенный тип силовой передачи в соревновательной робототехнике. Управление этого типа иногда называется также «танковый ход», так как зачастую применяется при конструировании танков. В ходовой части этого типа, колеса на правой стороне и колеса на левой стороне приводятся в действие отдельными электромоторами. Эти колеса фиксируются в положении «вперед/назад», и их рулевое управление не осуществляется. Управление колесами обеспечивается за счет изменения скорости каждой из сторон привода (например, если правая сторона движется вперед быстро, а левая - медленно - робот выполняет левый поворот).
Ходовая часть этого типа может выполнять поворот нулевого радиуса. Оператор должен просто привести стороны в действие таким образом, чтобы одна из них двигалась вперед, а другая - назад.
Для данного типа привода необходимо два электромотора, но не требуется специальный исполнительный механизм рулевого управления - оба электромотора используются для реализации движения вперед, поэтому ВСЯ мощность используется для ускорения или толкания. Когда ходовая часть поворачивает, на нее действует поворотный скраб (речь о котором будет вестись позже).
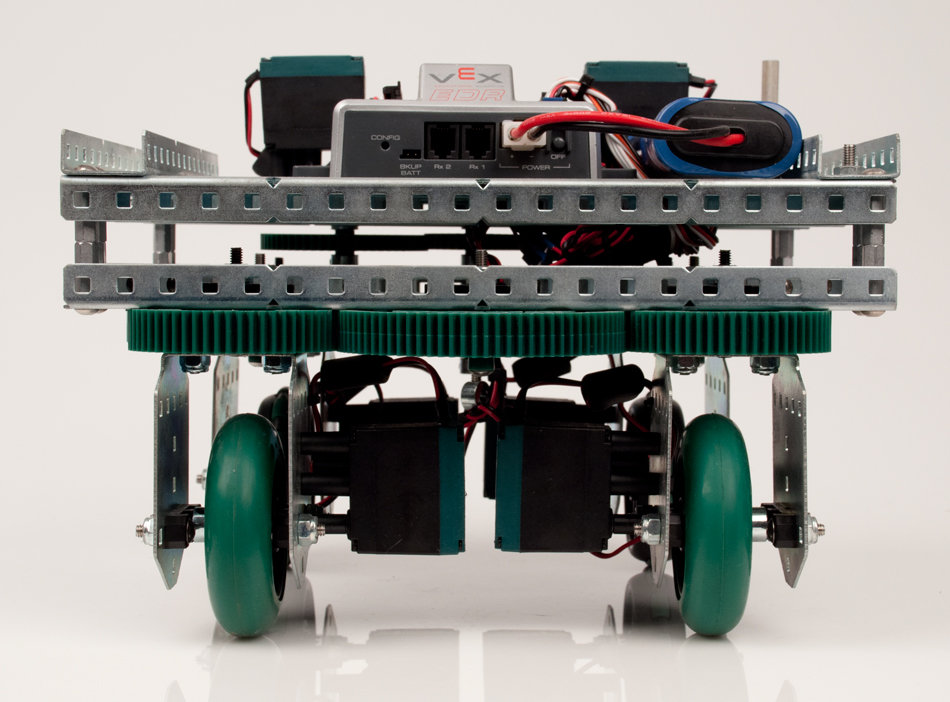
Ходовые части с однобортным управлением могут иметь различные конфигурации, но принцип их действия одинаков.

Остальная часть блока будет посвящена ходовым частям с однобортным управлением.
Маневровое управление:
Ходовые части с маневровым управлением являются еще одним распространенным типом в соревновательной робототехнике. В маневровом приводе колеса могут не только перемещаться вперед и назад, но также имеют независимое рулевое управление. Это означает, что робот может выполнять те же повороты, что и робот с однобортным типом управления, но при этом он способен перемещаться в любом направлении за счет рулевого управления колесами.
Привод-тележка:
В приводной системе типа «тележка» используются два комплекта ходовых частей с однобортным управлением, каждая из которых имеет свое направление. Только один из этих приводов находится на земле в заданный момент времени. Например, тележка может иметь основной привод с однобортным управлением, способный перемещаться вперед и назад, с помощью которого тележка может спокойно выполнять повороты. Затем, она может оторвать от земли основную ходовую часть, опустить вторую ходовую часть, способную перемещаться влево и вправо, и с помощью нее перемещаться влево или вправо (как краб).
Всенаправленная ходовая часть:
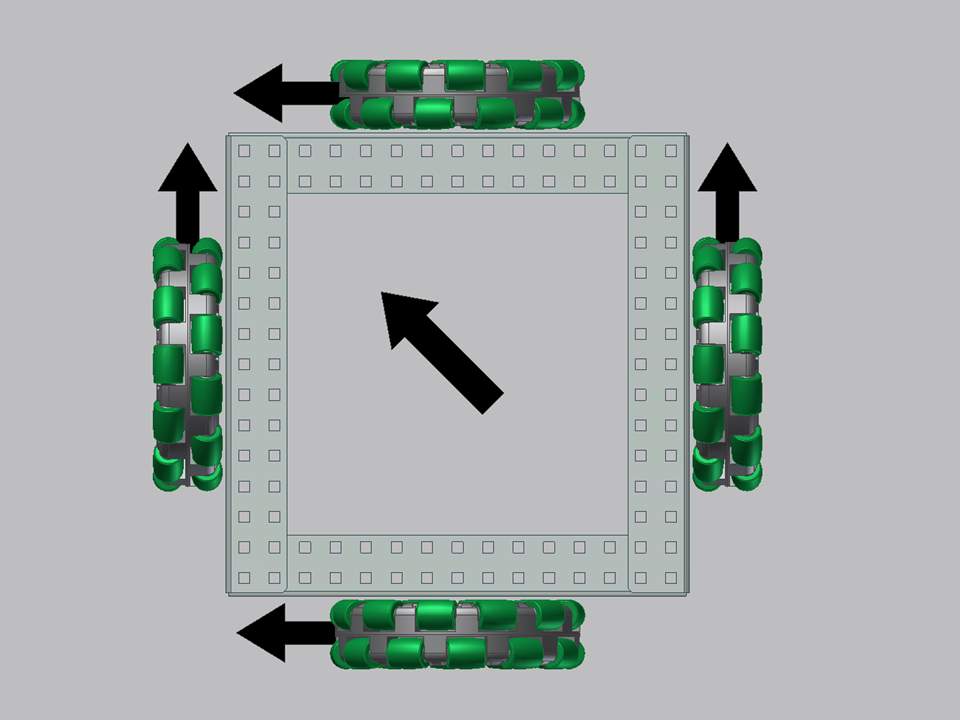
Ходовая часть, способная перемещаться в любом направлении в заданный момент времени, без необходимости ожидания управления со стороны колес, называется всенаправленной. В конструкции этой ходовой части используются специальные колеса, которые называются роликонесущими колесами. Роликонесущие колеса - это колеса с маленькими, установленными по периметру роликами, способными свободно вращаться перпендикулярно направлению вращения колеса. Это означает, что колеса могут скользить в стороны при чрезмерно малом трении.

Из рисунка выше видно, что зеленые ролики свободно вращаются перпендикулярно направлению движения колес. Колесо может скользить в сторону на этих роликах!
Роликонесущие колеса могут использоваться в различных конфигурациях для создания всенаправленного привода. Вот две наиболее распространенные конфигурации:


Так как роликонесущие колеса не имеют бокового трения, при движении колес направления «вперед/назад» колеса направления «влево/вправо» не подвергаются боковому волочению. Путем подключения обоих комплектов колес к силовой передаче может быть реализовано движение робота в любом направлении.


Единственным недостатком роликонесущих приводов является требование использования нескольких электромоторов, при этом лишь некоторые из них будут задействованы в обеспечении прямолинейного перемещения робота. Простой привод с однобортным управлением может быть собран с использованием двух электромоторов, но конструкция квадратного роликонесущего привода требует использования четырех электромоторов.