9.5: Проект зубчатой передачи
Зубчатая передача представляет собой элемент ходовой части, отвечающий за передачу мощность от электромотора к колесам.
Скорость колеса:
Первой концепцией, с которой необходимо познакомиться, это метод расчета скорости, с которой робот перемещается через поле, на базе скорости вращения колес. Каждый раз, когда колесо производит полный оборот, оно перемещается вперед на расстояние, равное длине своей окружности. Таким образом, расстояние, которое преодолевает робот за один оборот колеса, можно рассчитать, узнав длину окружности последнего.
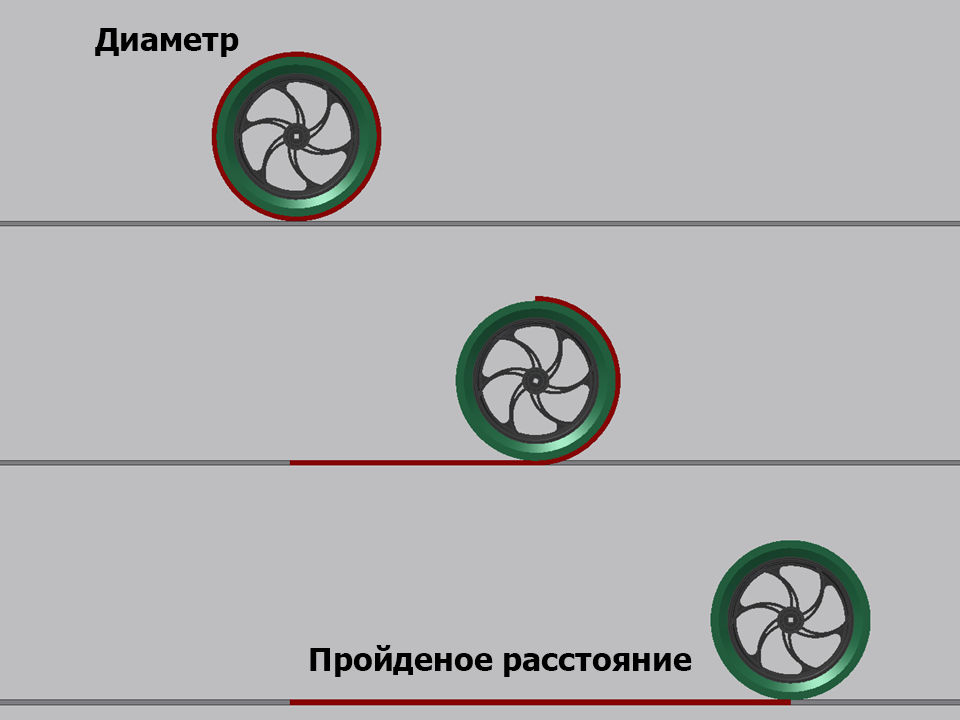
Длина окружности колеса равна его диаметру, умноженному на Pi (математическая постоянная, равная приблизительно 3,14).
Как только стала известна длина окружности колеса, можно рассчитать скорость перемещения робота на базе частоты вращения колеса. Из примера, представленного выше, видно, что диаметр колеса составляет 101,6 мм (4 дюйма), при этом колесо вращается со скоростью 100 об/мин (оборотов в минуту). На основании этого можно рассчитать скорость перемещения робота в мм/сек:
Окружность = Диаметр х Pi
Окружность = 101,6 мм х 3,14
Окружность = 319,024 мм
За 1 оборот колеса робот перемещается на 319,024 мм. Колесо катится со скоростью 100 оборотов в минуту, или 100 оборотов за 60 секунд.
Исходя из этого, можно рассчитать линейную скорость робота:

Таким образом, робот движется со скоростью, приблизительно равной 532 мм/сек, или 0,532 м/сек.
Используя этот метод, а также зная технические характеристики электромоторов VEX, учащиеся могут определить передаточное отношение робота VEX, необходимое для достижения желаемой максимальной скорости.
ПРИМЕР расчета передаточного числа для получения желаемой максимальной скорости:
Предположим, диаметр колеса робота составляет 69,85 мм (2,75 дюйма), при этом электромотор вращается со скоростью 100 об/мин. Для данного случая проектировщик указал, что желаемая скорость робота должна составлять 900 мм/с. Каково при этом должно быть передаточное число? (Для выполнения расчетов необходимо применить знания о передаточном отношении, речь о котором велась в Блоке 8).
В первую очередь, необходимо рассчитать количество оборотов в минуту, необходимое для того, чтобы заставить колесо вращаться с желаемой скоростью, равной 900 мм/сек.
Окружность = Диаметр х Pi
Окружность = 69,85 мм х 3,14
Окружность = 219,329 мм
Таким образом, за 1 оборот колеса робот перемещается на 219,329 мм. Преобразование целевой скорость в обороты в минуту на базе длины окружности:
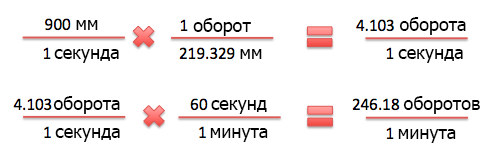
Зная, что колесо должно вращаться со скоростью 246,18 об/мин, а электромотор вращается со скоростью 100 об/мин, можно рассчитать требуемое передаточное число с помощью уравнения из Блока 8:
Требуемое передаточное число = Входная скорость / Выходная скорость
Требуемое передаточное число = 100 об/мин / 246,18 об/мин
Требуемое передаточное число = 0,4062
Таким образом, для получения желаемой максимальной скорости свыше 900 мм/сек, проектировщик должен использовать в передаточное число, не превышающее значение 0,4062.
Нагружение и зубчатый механизм электромотора:
Второй концепцией, которую проектировщики должны учитывать при проектировании ходовых частей, это зависимость конструкции силовой передачи от нагружения электромотора. В частности, очень важно учесть максимальную нагрузку, прилагаемую ходовой частью к электромотору. Эта нагрузка может возникнуть в ситуациях, когда робот будет толкать неподвижный (не способный к движению) объект, влетев в него на полном ходу. В этой ситуации колеса начнут скользить по поверхности пола, при этом трение, возникшее между колесами и поверхностью пола, будет действовать на электромотор как тормоз.
Первый этап заключается в определении количества колес, выполняющих функцию тормоза для коробки передач. Только колеса, подключенные напрямую через привод или цепь, будут прикладывать нагрузку к коробке передач и электромотору.
Второй этап заключается в определении массы робота, размещенной на каждом из этих колес. Как уже обсуждалось ранее, тяга между колесами и поверхностью пола зависит от нормальной силы, прижимающей их друг к другу.
В качестве примера рассмотрим робота на следующем рисунке:
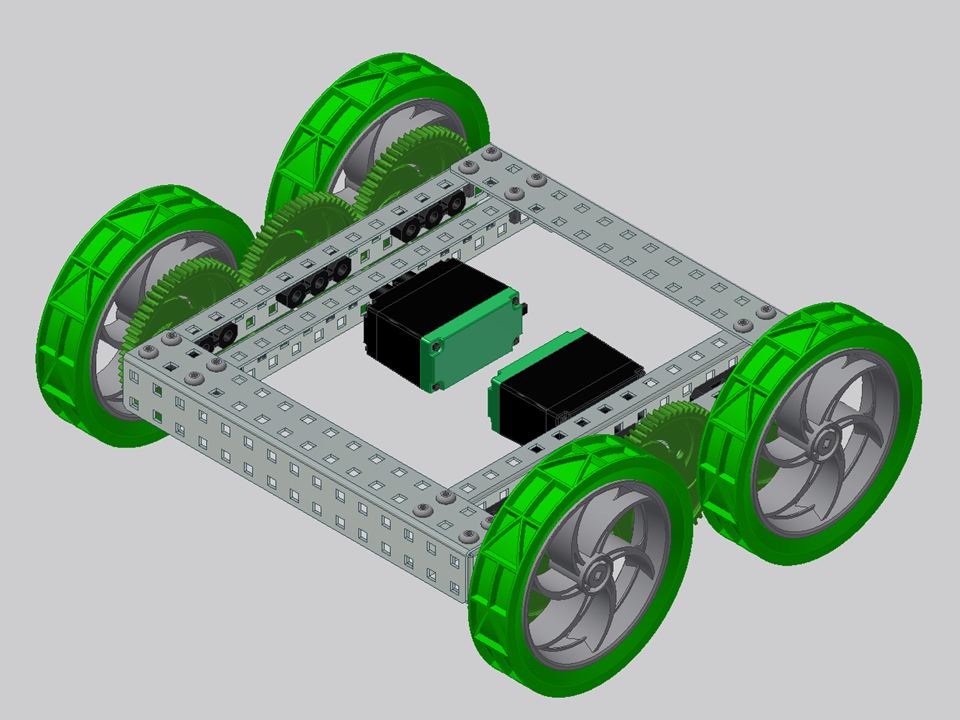
В данном случае, масса робота равномерно распределена между четырьмя колесами, при этом каждая пара (правая и левая стороны) колес подключена напрямую к электромотору через зубчатый механизм. Это означает, что каждый на каждый электромотор приходится 1/2 тягового усилия робота, выполняющего роль тормоза.
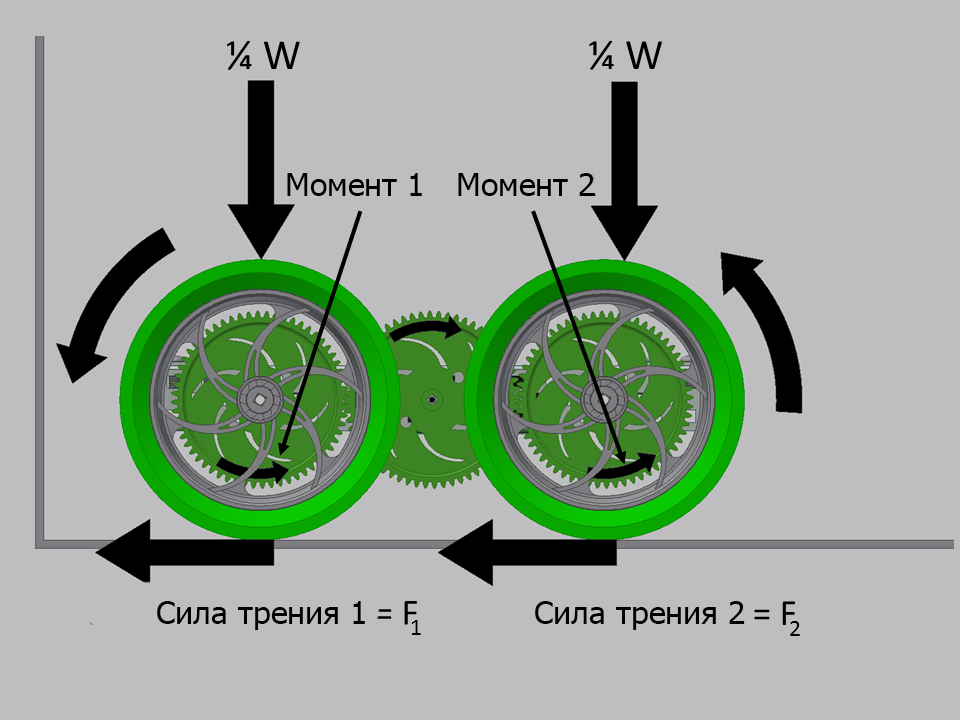
Как показано на рисунке выше, трение, создаваемое каждым колесом, принимает участие в создании крутящего момента, противодействующего движению электромотора. Каждый из двух крутящий моментов способствует увеличению нагрузки на электромотор.
Если в силовую передачу входят несколько соединенных электромоторов (например, два электромотора задействованы в управлении движением одного набора ведущих колес), крутящий момент равномерно распределяется между ними.
При проектировании важно, чтобы конструкция зубчатого механизма позволяла достичь нагрузки на каждый электромотор, не превышающей установленного для данного электромотора ограничения (как уже обсуждалось в Блоке 8). Чтобы обеспечить соблюдение установленных ограничений, проектировщики должны использовать знания о передаточных числах.
Используя две концепции, рассмотренные выше, а также информацию из блоков 7 и 8, проектировщики должны создать такой зубчатый механизм, который позволит роботу перемещаться с желаемой скоростью. Необходимо исключить возникновение чрезмерной нагрузки на электромоторы.