9.4: Геометрические размеры и поворотная способность ходовой части
Как говорилось выше, одним из наиболее распространенных типов ходовой части робота является ходовая часть с возможностью однобортного управления. Ходовая часть этого типа состоит из двух независимых комплектов ведущих колес, по одному комплекту с каждой стороны шасси. Посредством управления скоростью каждой отдельной стороны достигается способность робота поворачивать по дуге. Эта ходовая часть также позволяет выполнять поворот нулевого радиуса (крутиться на месте). Для этого обе стороны должны двигаться с одинаковой скоростью в противоположных направлениях.
Одним из главных качеств ходовой части является ее поворотная способность. Поворотная способность ходовых частей зависит от двух основных характеристик: поворотный момент и поворотный скраб.
Поворотный момент - это крутящий момент, возникающий вокруг точки поворота и обеспечивающий выполнение роботом поворота.
Поворотный скраб - это трение, противодействующее повороту робота. Поворотный скраб возникает в результате бокового волочения колес по земле при выполнении роботом поворотного движения и сопротивляется этому движению. Поворотный скраб может также быть выражен как крутящий момент, возникающий вокруг точки поворота робота и противодействующий поворотному моменту.
В типичной ходовой части с однобортным управлением (особенно там, где все колеса являются ведущими) ВСЕ колеса прилагают силу, чем способствуют возникновению поворотного момента, и ВСЕ они подвергаются боковому волочению, чем способствуют возникновению поворотного скраба. Чтобы понять этот процесс, можно представить себе робота в необычной конфигурации, изображенной ниже:
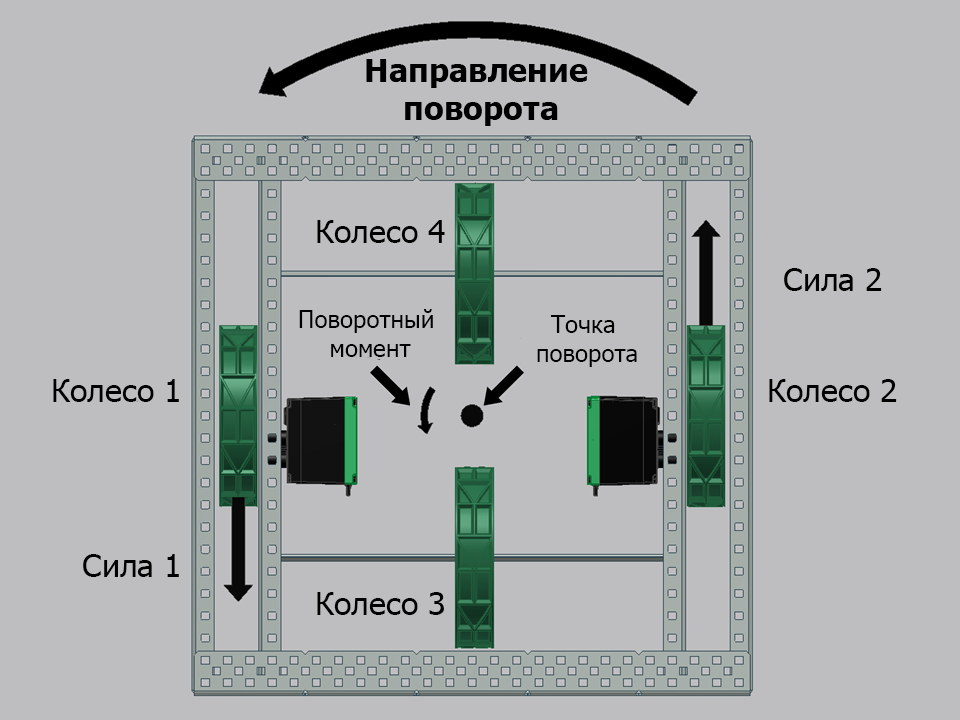
Здесь, колесо 1 и колесо 2 участвуют в создании поворотного момента. Каждое из них прикладывает линейную силу (сила 1 и сила 2), создающую крутящий момент вокруг точки поворота. Это колеса не не подвергаются волочению при выполнении роботом поворота, поэтому они не способствуют возникновению поворотного скраба.
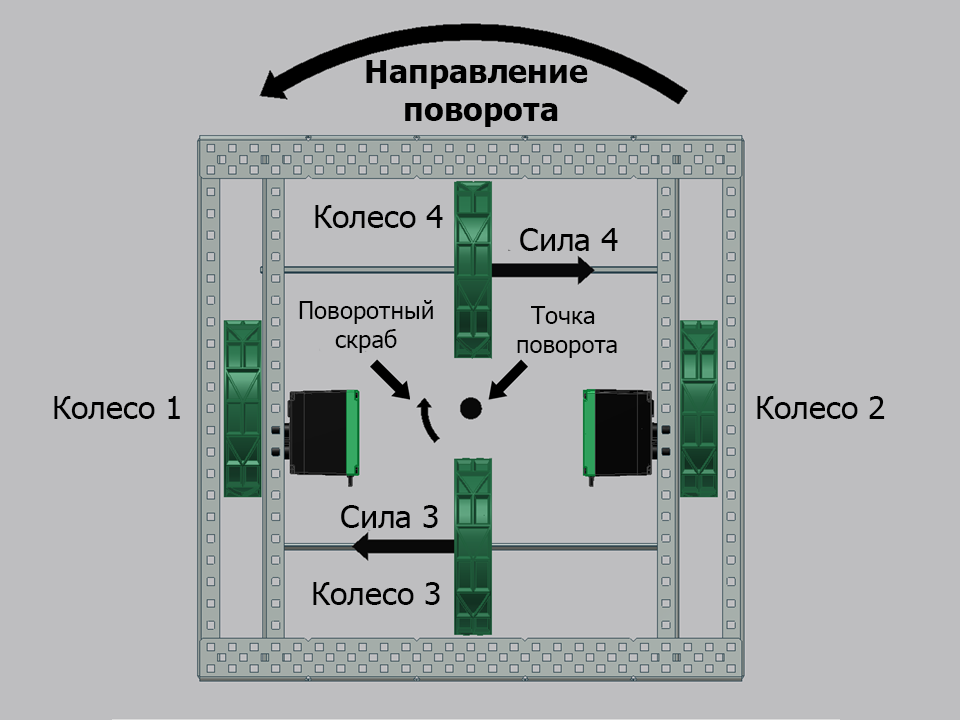
Колесо 3 и колесо 4 не участвуют в создании поворотного момента, но они скользят в сторону при выполнении роботом поворота и тем самым вносят существенный вклад в возникновение поворотного скраба. Сила 3 и сила 4 - это силы трения, действующие между колесами и поверхностью и способствующие возникновению поворотного скраба.
В более традиционной конфигурации ходовой части все колеса участвуют в создании поворотного момента и в возникновении поворотного скраба:
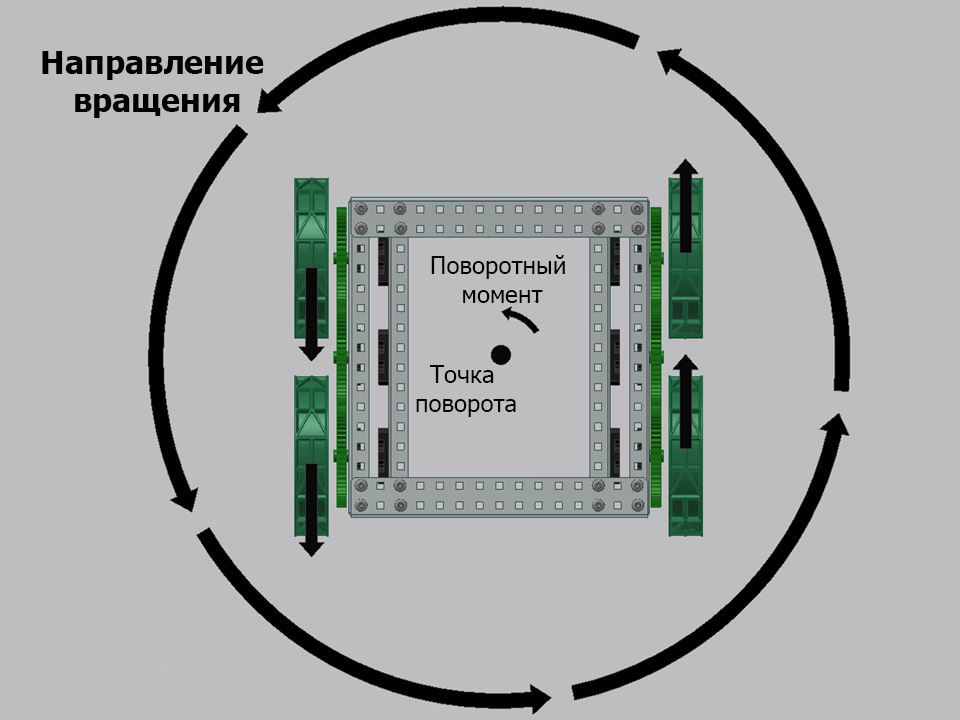
Из рисунка, представленного выше, видно, что все четыре колеса участвуют в создании поворотного момента, и все четыре колеса способствуют возникновению поворотного скраба. Каждое колесо прикладывает некоторую силу, способствующую выполнению роботом поворота, и каждое колесо скользить в сторону, чем способствует возникновению некоторого трения при волочении.
Поворотный момент и поворотный скраб - это два крутящих момента, возникающих вокруг точки поворота робота. Как уже обсуждалось в Блоке 7, крутящий момент является вращающей силой, определяемой линейной силой, действующей на расстоянии от центра вращения. На схемах ниже показано, как сила трения колеса, катящегося вперед, способствует возникновению поворотного момента робота, и как сила трения колеса, скользящего в сторону, способствует возникновению поворотного скраба робота.
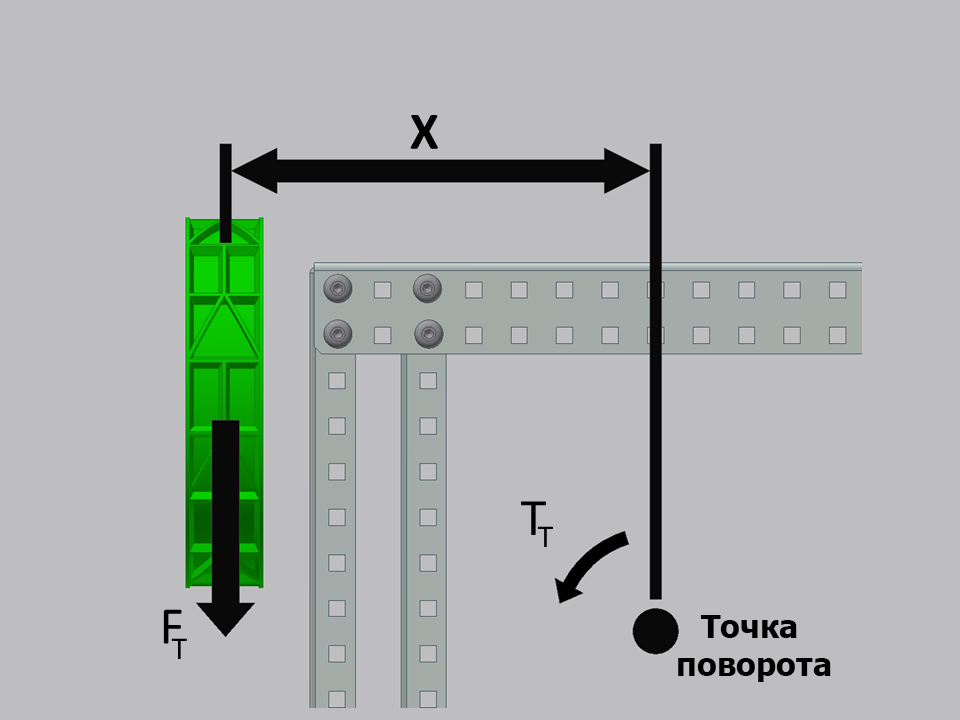
Из схемы видно, что поворотный момент возникает за счет силы трения колеса, действующей на расстоянии от точки поворота.
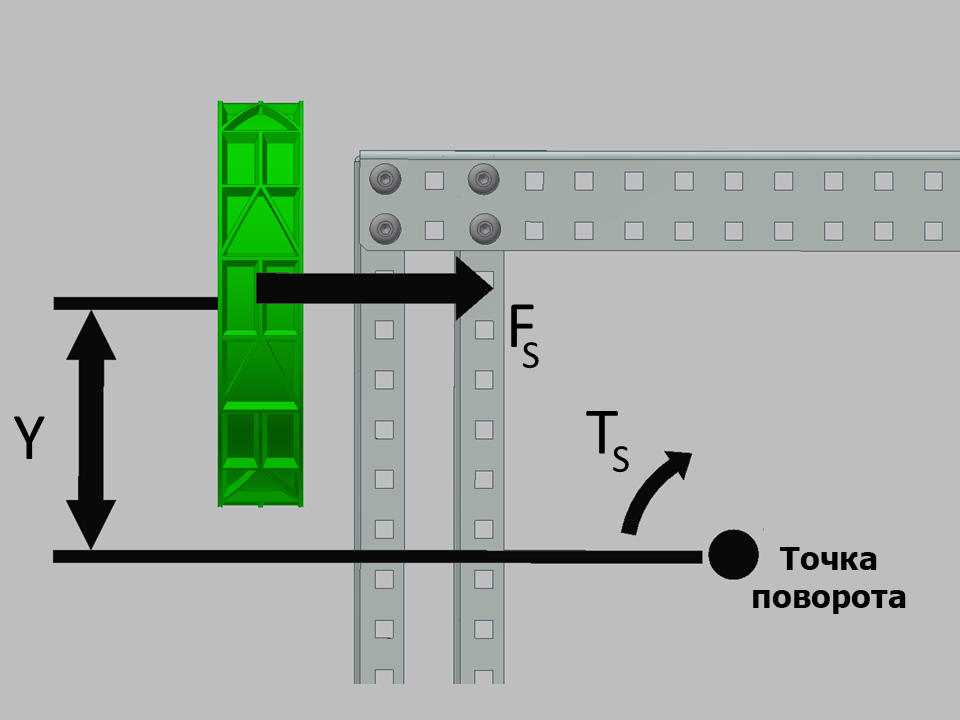
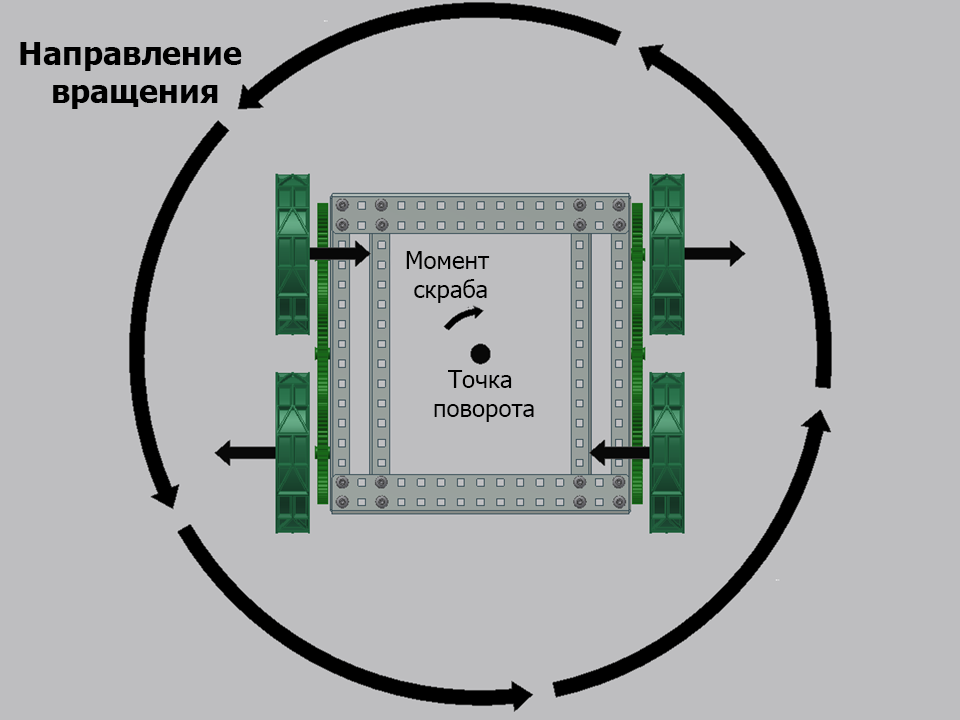
Из схемы видно, что поворотный скраб возникает за счет действия силы колеса, направленной вокруг точки поворота.
Если в ходовой части на поверхности земли находится несколько колес, все эти колеса задействованы, в зависимости от их расположения на ходовой части относительно точки поворота.
ПРОЕКТИРОВАНИЕ ПОВОРАЧИВАЕМОЙ ХОДОВОЙ ЧАСТИ:
После знакомства с основами поворотного момента, а также его влияния на поворотную способность робота, учащиеся могут приступить к изучению возможностей их применения для усовершенствования поворотной способности робота.
Как можно уменьшить поворотный скраб?
Поворотный скраб возникает под действием силы трения, вызванной боковом скольжением колеса по поверхности пола. Поворотный скраб может быть уменьшен посредством уменьшения этой силы трения, а также путем сокращения расстояния между колесом и точкой поворота.
По аналогии, поворотный момент может быть увеличен обратным методом, путем увеличения силы трения или расстояния от точки поворота.
Необходимо обратить внимание на то, что для того, чтобы уменьшить поворотный скраб, необходимо уменьшить трение колеса в направлении «влево/вправо». Чтобы увеличить поворотный момент, необходимо увеличить трение колеса в направлении «вперед/назад». Очень сложно управлять трением колеса в одном направлении, не воздействуя при этом на другое, поэтому, как правило, самым лучшим методом усовершенствования поворотной способности робота является изменение геометрических размеров шасси.

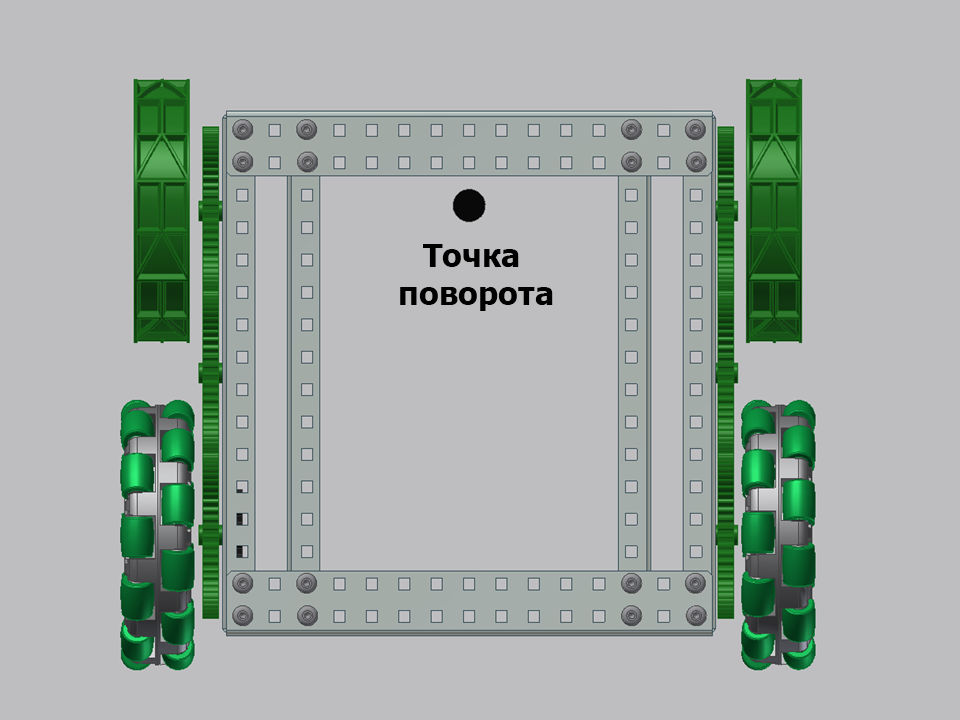
Тем не менее, проектировщики должны учитывать, что всенаправленные колеса обладают НУЛЕВЫМ боковым трением. Это означает, что ходовая часть с роликонесущими колесами НЕ имеет поворотного скраба, создаваемого колесами. Ходовая часть, ВСЕ колеса которой являются роликонесущими, обладает практически НУЛЕВЫМ поворотным скрабом!
Интересно то, что точка поворота ходовой части с двумя роликонесущими и двумя ведущими колесами будет находиться точно между двумя ведущими колесами. Такая ходовая часть также не имеет поворотного скраба, так как ведущие колеса не будут скользить в сторону.
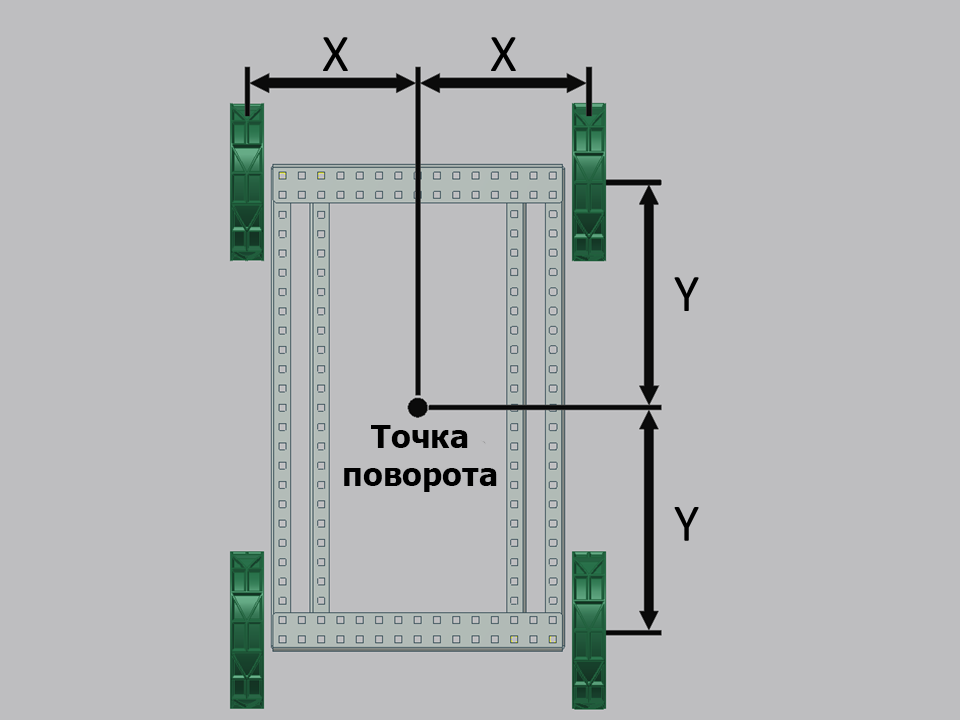
Из примера, представленного выше, видно, что конфигурация ходовой части узкая и длинная. Данная конфигурация обладает плохими поворотными характеристиками из-за малого поворотного момента и большого поворотного скраба.
Из примера, представленного выше, видно, что конфигурация ходовой части широкая и короткая. Данная конфигурация обладает очень хорошими поворотными характеристиками из-за большого поворотного момента и малого поворотного скраба.
Все примеры, представленные выше, являются упрощенной иллюстрацией основных концепций. Еще одним важным фактором, влияющим на динамику системы, является расположение точки поворота. Во всех примерах, рассмотренных ранее, точка поворота находилась точно в центре робота. Но в реальности это не всегда так.
Точка поворота может смещаться в зависимости разницы между колесами (передние vs. задние; или левые vs. правые). В основном причиной является трение между каждым отдельным колесом и поверхностью пола. Как уже обсуждалось ранее, трение зависит от массы, опирающейся на колеса, а также от коэффициента трения колес. Это означает, что если значительная часть массы размещается в передней части робота, точка поворота также сместится вперед.
Тяговое усилие разных колес и размещение массы робота оказывают большое влияние на расположение точки поворота, а также на поворотный момент и поворотный скраб робота.
Чтобы усовершенствовать робота, необходимо настроить три вещи: геометрические параметры шасси (узкая или широка, длинная или короткая), разницу коэффициента трения для различных колес (прежде всего, вперед/назад) и расположение центра тяжести робота.