8:10: Моделирование шарнирного ковша
В ходе испытаний прототипа ковша было выявлено, что движением ковша управлять сложно. Непосредственный привод от электромотора к стопорной пластине работает слишком быстро, поэтому оператору сложно захватить в ковш игровой объект. Для решения данной проектной задачи, в среде Autodesk Inventor был спроектирован и испытан зубчатый привод.
В рамках данного проекта представлено 7 видеороликов, включая «Обзор» и «Итоги». Чтобы получить доступ к видеороликам, необходимо щелкнуть по ссылке. Чтобы внимательно изучить и понять содержимое видео-роликов, используйте функции «pause» (пауза), «rewind» (перемотка назад), «fast forward» (ускоренная перемотка вперед) и «stop» (стоп). В видеороликах описывается:
- Модификация рамы ковша.
- Моделирование сборки ведущего вала.
- Моделирование сборки зубчатой передачи.
- Анимация сборки.
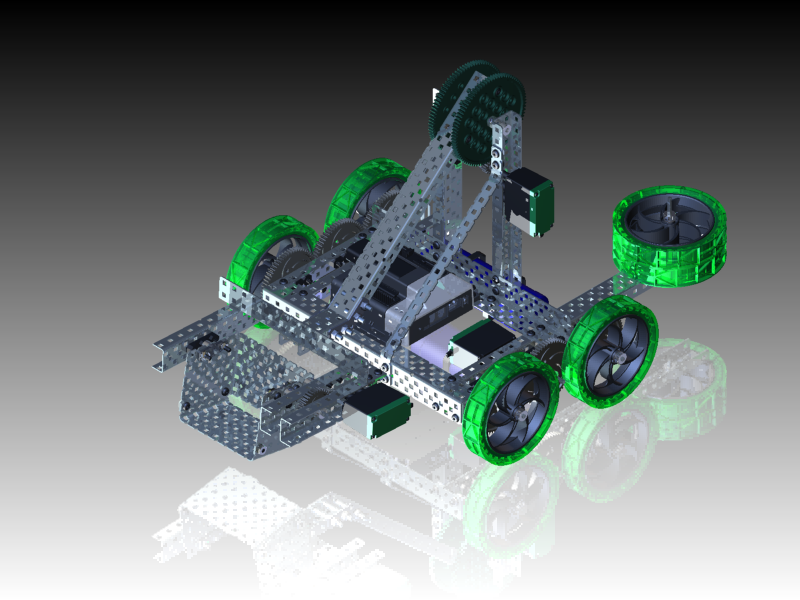
Обзор:
![]()
Нажать здесь, чтобы загрузить видео для автономного просмотра.
В этом видеоролике представлен обзор ключевых этапов проектирования и моделирования сборки зубчатой передачи для ковша. Для решения проектной задачи, заключающейся в настройке движения ковша, учащиеся вносят изменение в конструкцию и разрабатывают ходовую силовую передачу.
Видео 1: Моделирование сборки прямозубой цилиндрической зубчатой передачи
![]()
Нажать здесь, чтобы загрузить видео для автономного просмотра.
В этом видеоролике представлен порядок разработки учащимися сборки зубчатой передачи в среде Autodesk Inventor с помощью инструментов Design Accelerator. Инструменты Design Accelerator позволяют быстро моделировать и вставлять в сборки стандартные механические части, например валы, шестерни, клиновидные ремни и опоры. В рамках данного проекта представлена техника создания сборки зубчатой передачи.
Примечание: необходимые для выполнения этой работы файлы должны быть загружены заранее. Необходимо выбрать комплект данных, соответствующий версии Autodesk Inventor, используемой для выполнения этой работы. Далее необходимо распаковать файлы и сохранить их в новую папку проекта с названием «Manipulator».
Inventor 2011 - Imperial.zip
Inventor 2012 - Imperial.zip
Inventor 2013 - Imperial.zip
Inventor 2011 -Metric.zip
Inventor 2012 - Metric.zip
Inventor 2013 - Metric.zip
Видео 2: Моделирование сборки прямозубой цилиндрической зубчатой передачи
![]()
Нажать здесь, чтобы загрузить видео для автономного просмотра.
В этом видеоролике представлен процесс модификации существующей сборки ковша учащимися. Для размещения силовой передачи производится модификация рамы ковша. Затем на раму устанавливается новый элемент, в сборку также добавляются два вала с воротниками.
Видео 3: Сборка передач
![]()
Нажать здесь, чтобы загрузить видео для автономного просмотра.
В этом видеоролике показано размещение учащимися шестерен в сборку. Исходная силовая передача состоит из 12-зубой и 36-зубой шестерен. Шестерни помещаются в сборку, закрепляются на ведущих валах и выравниваются друг относительно друга.
Видео 4: Завершение сборки зубчатой передачи
![]()
Нажать здесь, чтобы загрузить видео для автономного просмотра.
В этом видеоролике представлена сборка учащимися плоских опор и опорных заклепок для завершения сборки зубчатой передачи. Чтобы удерживать валы на месте, необходимо установить в сборку плоские опоры и воротники.
Видео 5: Добавление электромотора и анимация сборки
![]()
Нажать здесь, чтобы загрузить видео для автономного просмотра.
В этом видеоролике представлен процесс установки электромотора на вал и проверки правильности вращения зубчатой передачи. После установки на место силовой передачи, в сборку помещается оригинальный электромотор и закрепляется на ведущем валу. Далее необходимо проверить вращение шестерен и валов. Если все части вращаются правильно, создается анимация.
Итоги:
![]()
Нажать здесь, чтобы загрузить видео для автономного просмотра.
В этом видеоролике представлен обзор ключевых этапов проектирования и моделирования сборки зубчатой передачи для ковша. Для решения проектной задачи, заключающейся в настройке движения ковша, учащиеся вносят изменение в конструкцию и разрабатывают ходовую силовую передачу.
Хотите познакомиться с другими проектами на базе роботов VEX, а также другими увлекательными испытаниями? Посетите мастерскую Autodesk Digital Steam Workshop. www.autodesk.com/digitalsteam
Статьи текущего раздела
- 8.1: Введение
- 8.2: Передача механической мощности
- 8.3: Зубья и шаг шестерни
- 8.4: Передаточное отношение
- 8.5: Реверсивные и промежуточные зубчатые передачи
- 8.6: Ступенчатые зубчатые редукторы
- 8.7: Другие типы редукторов
- 8.8: Передаточное отношение в системах электромоторов постоянного тока
- 8.9: Проект руки
- 8:10: Моделирование шарнирного ковша
- 8.11: Формулы
- 8.12: Проектный отчет