6.2: Манипуляторы
В соревновательной робототехнике, все объектные манипуляторы могут быть классифицированы в двух основных категориях.
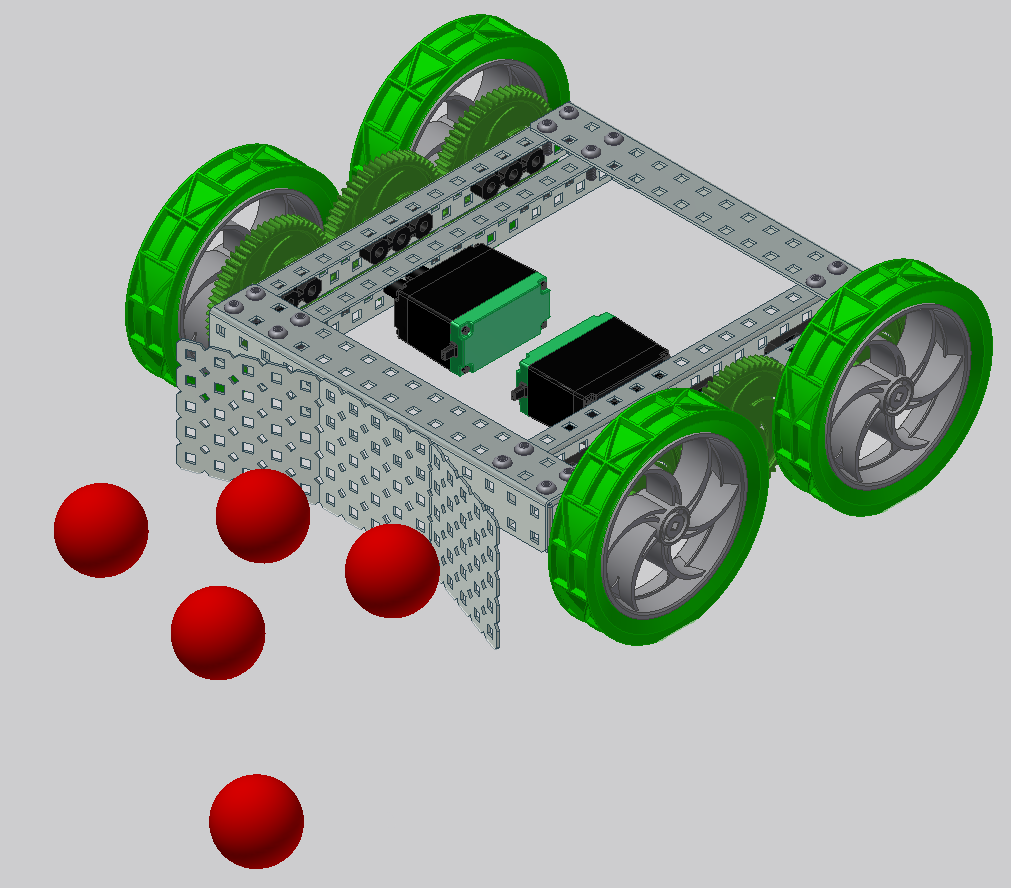
Плуг:
В первую категорию входят манипуляторы, прилагающие одну силу к стороне объекта. Они перемещают объекты, не поднимая их. Одной из наиболее распространенных форм этих манипуляторов является обыкновенный плуг.
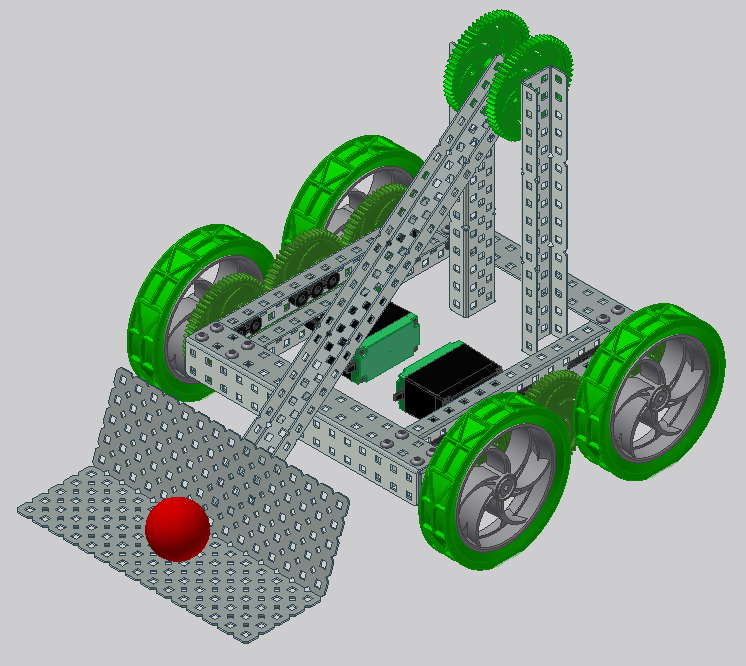
Ковш:
Ко второй категории принадлежат манипуляторы, которые прикладывают силу ко дну объекта таким образом с целью его подъема и перемещения. Наиболее распространенной формой этого типа манипуляторов является ковш.

![]()
Нажать здесь, чтобы загрузить видео для автономного просмотра.
В этом видеоролике представлен шарнирно-звеньевой ковш
Фрикционный захват:
В третью категорию входят манипуляторы, которые прикладывают нормальную силу между объектом и фрикционной поверхностью и, затем, манипулируют объектом, используя силу трения между ним и фрикционной поверхностью. Эта категория манипуляторов может быть представлена с помощью фрикционного захвата. Наиболее распространенной формой этого манипулятора являются клещи, зажимающие объект между пальцами; пальцы прилагают к объекту нормальную силу, нажимая на него, при этом трение, возникающее между пальцами и данным объектом, позволяет манипулировать последним.
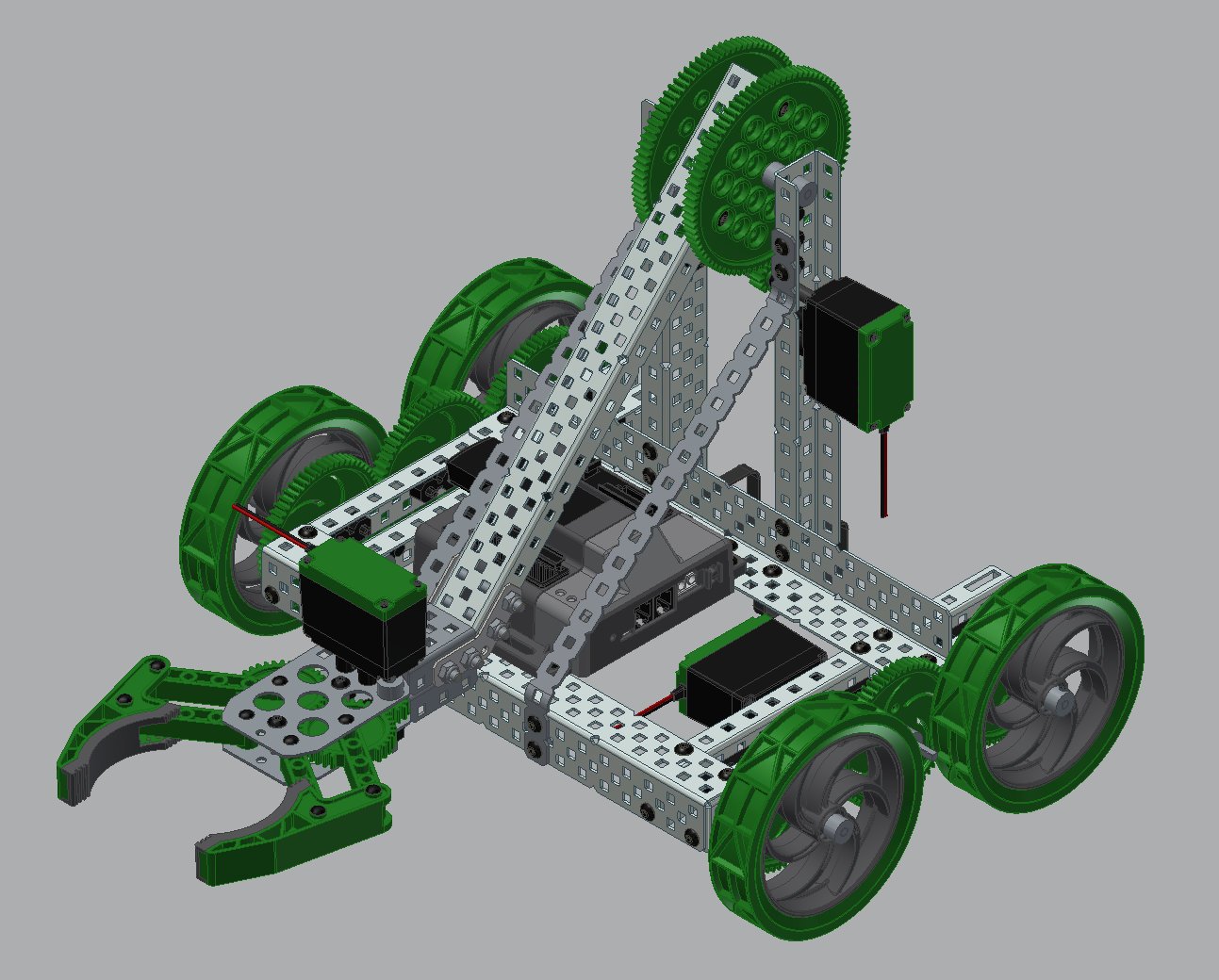

Рисунок выше иллюстрирует силу, которую пальцы клещей прикладывают к мячу, и возникающие в результате нормальные силы.
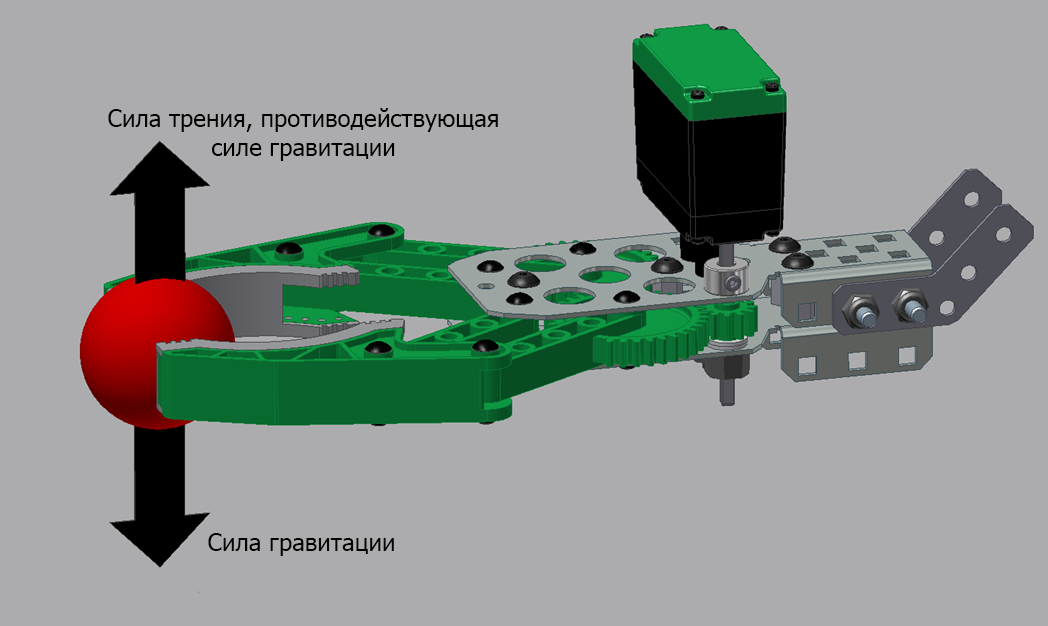
Рисунок выше иллюстрирует силу трения, возникающую между мячом и пальцами клещей, сопротивляющуюся силе гравитации, заставляющей мяч стремиться вниз.
![]()
Нажать здесь, чтобы загрузить видео для автономного просмотра.
В этом видеоролике представлены возможности применения фрикционного захвата.
Разделение на эти три категории не является абсолютным. Объектные манипуляторы могут обладать и другими характеристиками. Но эти три категории позволяют проектировщикам представить практически все типы манипуляторов. Некоторые распространенные манипуляторы в соревновательной робототехнике представлены ниже.
Зажимные клещи:
Как упоминалось выше, зажимные клещи представляют собой пример фрикционного захвата. Зажимные клещи можно собрать с использованием всего нескольких деталей. Клещи при этом обладают способностью захватывать объекты различных типов.

Проектировщики, работающие над созданием зажимных клещей, должны включить в проект элемент гибкости (эластичности). Эта гибкость должна быть реализована либо в объекте (например, мягкий мяч), либо в самих клещах (например, гибкие пальцы). Использование свойств гибкости позволяет обеспечить более согласованный захват объекта, так как нормальная сила, действующая на объект, также будет более согласованной. Присутствие согласованной нормальной силы позволяет получить согласованную силу трения и, в результате, надежный захват.

На рисунке выше представлен пример гибких клещей - каждая рука захвата снабжена гибкими пальцами.

На рисунке выше представлен пример эластичного объекта - мягкий куб, сжимающийся при захвате клещами.
Правильно собранные зажимные клещи не требуют постоянного подключения к источнику электроэнергии для удерживания объекта. В конструкции некоторых зажимных клещей используются внутренние пружины, обеспечивающие непрерывное воздействие силы, другие имеют в основе замковый механизм, третьи - исполнительный механизм, не имеющий обратного действия (например, червячная передача).

На рисунке выше показан пример клещей, в конструкцию которых входят резиновые кольца, обеспечивающие пружинное закрытие.
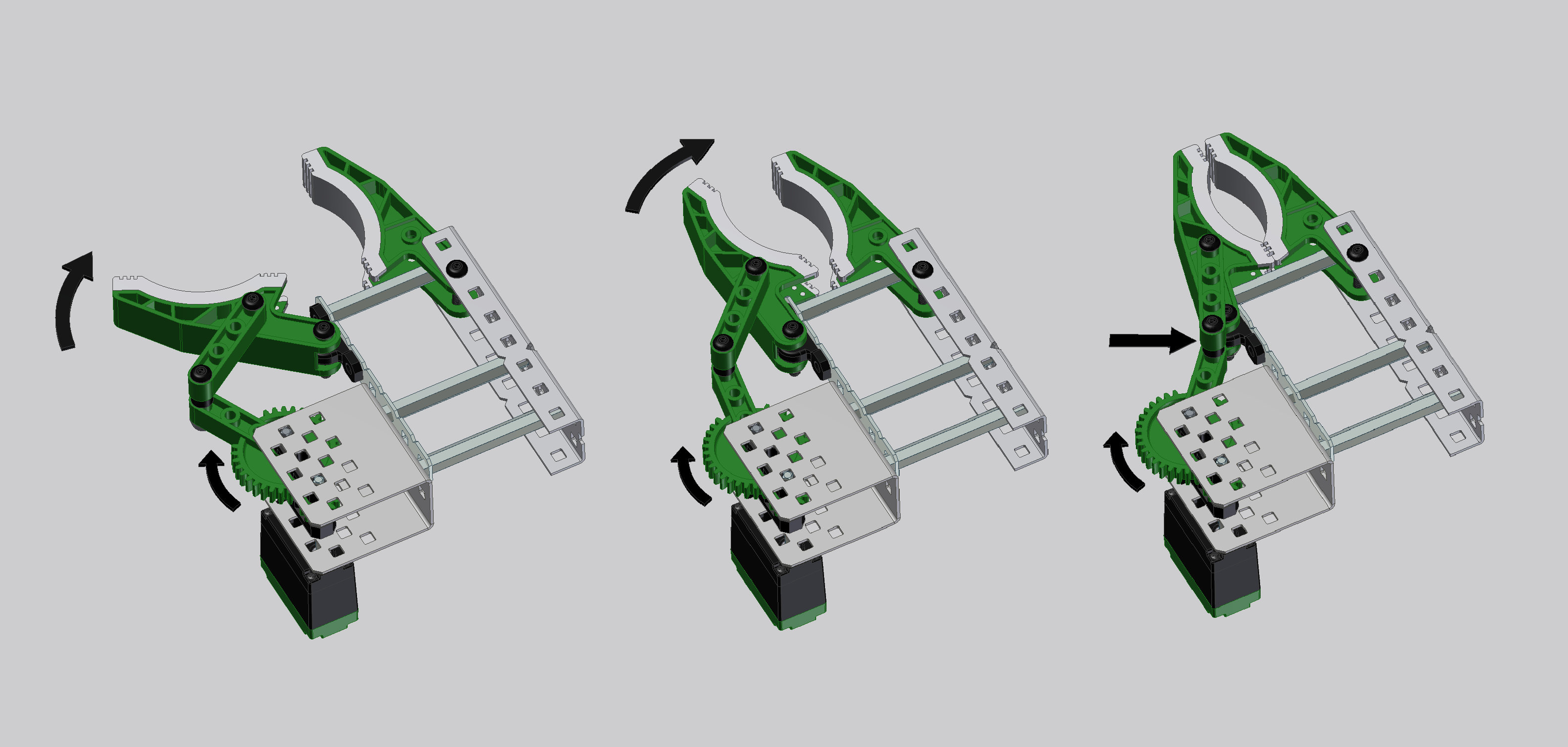
Рисунок выше иллюстрирует пример клещей, в конструкцию которых входит рычажный механизм, обеспечивающий закрытие.
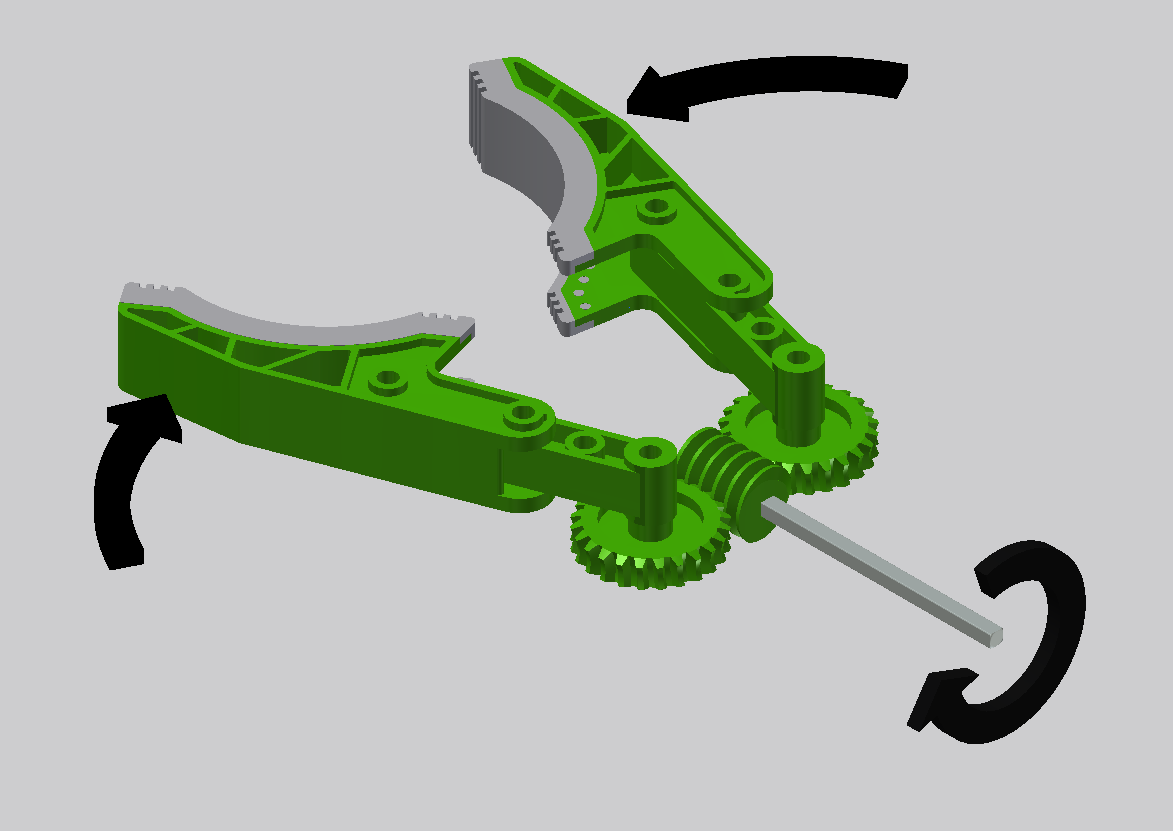
На рисунке выше изображен пример клещей, которые приводятся в действие с помощью червячной передачи.
Захват с верхней подвижной челюстью:
Еще одним распространенным типом соревновательного объектного манипулятора является захват с верней подвижной челюстью.
Этот тип манипуляторов реализован с помощью неподвижной нижней челюсти и приводной верхней челюсти. Этот тип манипуляторов, по сути, представляет собой комбинацию ковша и фрикционного захвата. Нижняя челюсть прилагает к объекту нормальную силу, направленную вверх, тогда как верхняя челюсть, нажимающая сверху, создает нормальную силу, благодаря которой возникает сила трения, удерживающая объект от выскальзывания.
Роликовые клещи:
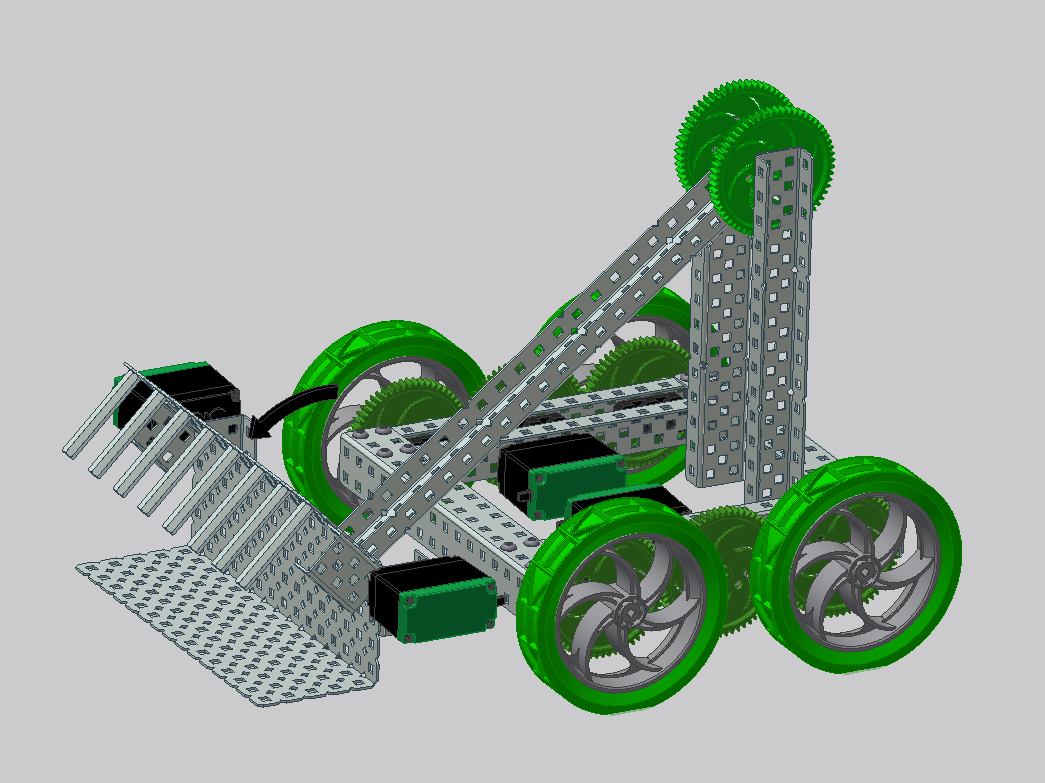
Одним из наиболее распространенных и эффективных типов объектных манипуляторов в соревновательной робототехнике являются роликовые клещи. В конструкции манипуляторов этого типа для проталкивания игровых объектов внутрь робота используются вращающиеся колеса или ролики. Подобные манипуляторы также являются разновидностью фрикционных захватов, так как принцип их действия основан на трении между роликами и объектами, которые они удерживают.


Как обсуждалось выше, трение в клещах поддерживается за счет присутствия элемента гибкости (эластичности), источником возникновения которого может служить как объект, так и сами клещи. Это особенно важно учитывать в конструкции роликовых клещей, так как исполнительный механизм не расположен в направлении действия нормальной силы (если ролики располагаются слишком далеко друг от друга, скорость их вращения не будет иметь значения, так как элемент гибкости (эластичности) будет отсутствовать, и нормальная сила не будет действовать на объект).

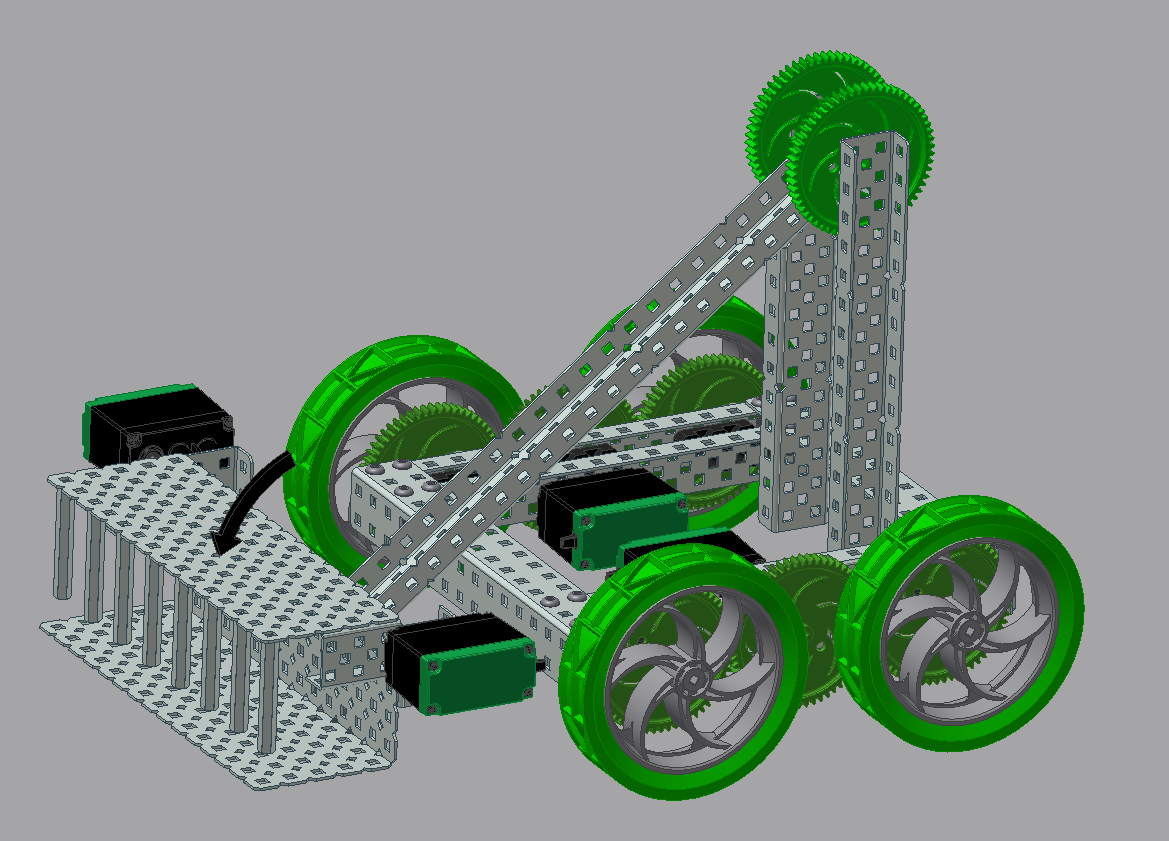
Роликовые клещи очень популярны в соревновательной робототехнике, так как с их помощью можно быстро поднимать игровые объекты без необходимости точного позиционирования робота. Операторы робота должны только включить ролики, коснуться объекта передней частью роликового захвата, и клещи сами втянут объект внутрь робота. Некоторые проектировщики настраивают манипулятор таким образом, что электромотор роликов автоматически отключается после выполнения захвата объекта (как описывалось выше, хорошие объектные манипуляторы не требуют постоянного подключения к источнику электропитания).
![]()
Нажать здесь, чтобы загрузить видео для автономного просмотра.
В этом видеоролике показаны роликовые клещи, установленные на руке робота.