6.3: Сборщики
В соревновательной робототехнике, робот должен обладать способностью подбирать единовременно несколько объектов. Для этого необходимо использовать специальный тип объектного манипулятора, который называется «сборщик». Сборщик - это механизм робота, который используется для подъема большого количества схожих объектов.
Накопители:
Существует несколько сходных типов сборщиков. Первый тип - накопитель, в хранилище которого объекты загружаются по одному и укладываются последовательно в фиксированном положении (т.е. первый захваченный объект будет выгружен в последнюю очередь). В сборщиках этого типа активное манипулирование объектами внутри зоны хранения не производится.


Ленточный конвейер:
Еще один тип сборщика - ленточный конвейер, также являющийся разновидностью накопителя. В конструкции накопителя конвейерного типа манипулирование объектами осуществляется с помощью ленты, даже после попадания объектов внутрь манипулятора. Ленточный конвейер может служить примером фрикционного захвата (по аналогии с роликовыми клещами, он способен удерживать более одного объекта), так как принцип его работы основан на создании трения между ремнем и объектом. Далее в блоке использование конвейерного механизма в проекте сборщика будет осуждаться более подробно.
Очень важно учитывать тот факт, что существует два основных типа ленточных конвейеров: шаговые (где лента перемещается, только когда захватывает объект, для обеспечения его сортировки) и непрерывные (где лента перемещается непрерывно, при этом объекты сортируются самостоятельно).

В примерах, приведенных выше, при захвате каждого объекта лента немного смещается, что позволяет равномерно распределять эти объекты внутри хранилища. Для этого необходима высокая точность управления, как со стороны оператора, так и при автономном программном управлении с применением датчиков. Если промежуток перемещения ленты установлен не правильно, либо лента перемещается слишком долго, возможно смятие объекта системой или некорректная расстановка объектов внутри системы.

Ленточный конвейер непрерывного действия, представленный выше, перемещается без остановок. Первый захваченный объект перемещается вверх по ленте до момента, когда он ударяет в заднюю стенку сборщика, где останавливается, и лента проскальзывает мимо него. Второй захваченный объект перемещается вверх до тех пор, пока не ударится о первый, после чего останавливается (теперь лента скользит мимо обоих неподвижных объектов). Данный тип сборщика прост в использовании, но более сложен в проектировании. Чтобы обеспечить правильную работу сборщика этого типа, проектировщик должен убедиться, что объекты правильно сортируются и не деформируются до формы, при которой лента может зажать их. Проектировщик должен также удостовериться, что между объектом и лентой возникает сила трения, достаточная для удерживания объектов внутри, но не достаточная для того, чтобы лента не тормозила после остановки объекта. При правильной настройке, сборщик этого типа может стать очень эффективным инструментом в соревновательной робототехнике.
Приемники:
К третьему типу сборщиков относятся простые приемники, или корзины. Приемник - это объемное хранилище объектов. Его отличие от накопителя заключается в том, что объекты располагаются внутри хаотично, без учета ориентации и положения! Инженеры, работающие над проектом приемника, должны удостовериться, что при любой ориентации объектов их защемление системой исключено. Необходимо определить форму объектов, наиболее подходящую для использования с приемником.
Существуют два типа приемников.
Приемники с опрокидывающим механизмом - это приемники, где методы захвата и высвобождения объектов различаются. Ниже приводится пример робота такого типа.

Этот робот поднимает объекты с помощью клещей и опрокидывает их в приемник, затем приемник наклоняется назад и опрокидывает хранилище, чтобы забить объекты в ворота.
Приемники обратного действия - это приемники, аналогичные накопителям, где высвобождение и сбор объектов осуществляется с помощью одного и того же механизма. Пример приемника обратного действия представлен ниже.

Этот сборщик втягивает объекты в большую корзину с помощью двух роликов. Чтобы забросить их в ворота, роботу необходимо просто изменить направление вращения роликов, чтобы вытолкнуть объекты обратно.
Существует множество успешных проектов, в которые сборщики входят в качестве части более сложной системы. Примером может служить робот, изображенный ниже.
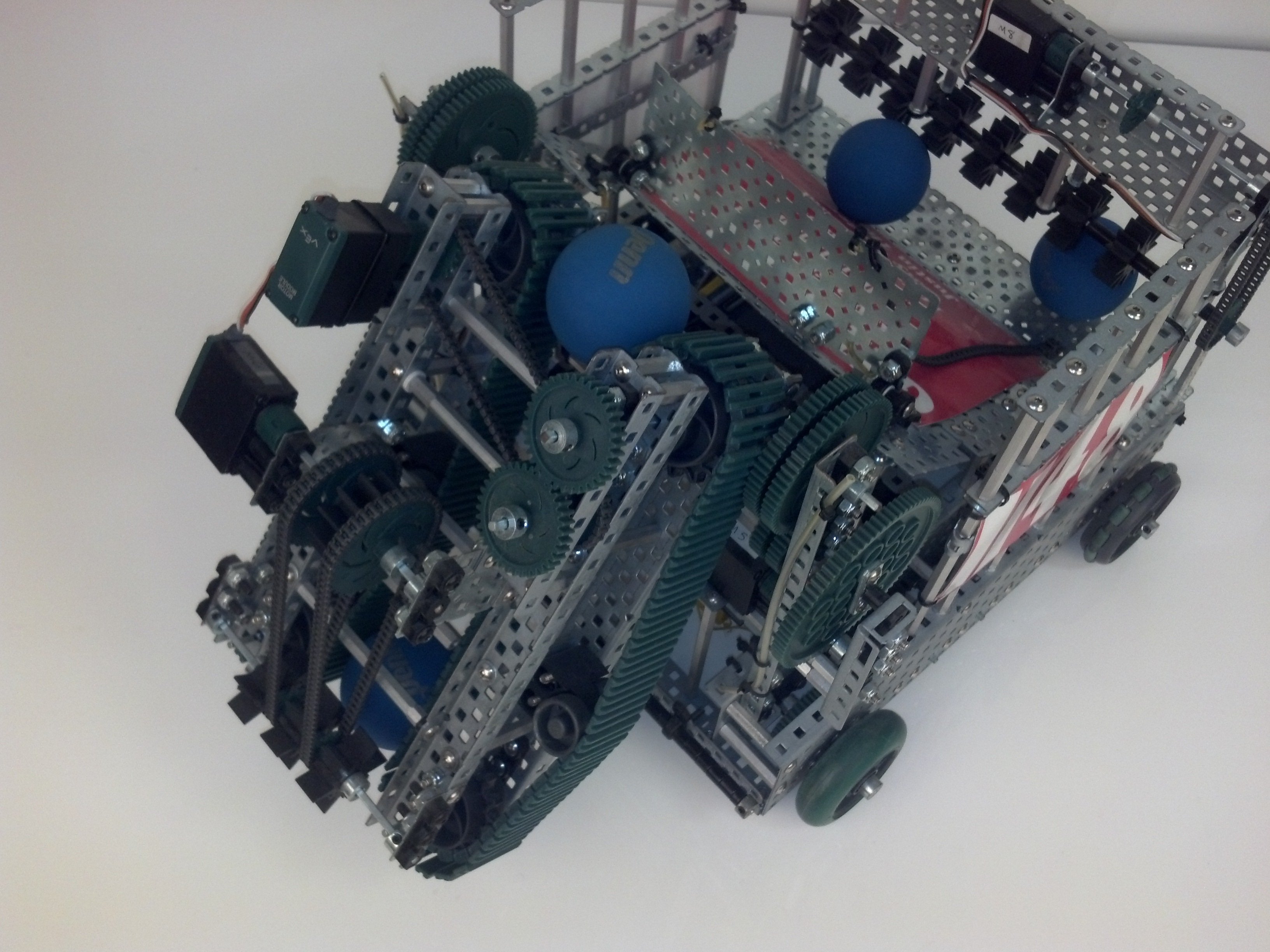
Этот робот использует непрерывный конвейер, чтобы поднимать синие ракеточные мячи с пола и помещать их в приемник, откуда мячи сбрасываются в ворота через проем в задней стенке с помощью отдельного механизма.
Конструкция сборщика:
Существует большое количество расчетных характеристик, общих для успешных проектов сборщиков. Лучшие соревновательные роботы-сборщики обладают следующими характеристиками:
- Широкий впуск (рот), охватывающий большую область без необходимости точного позиционирования робота.
- Средства предотвращения смятия объектов после их захвата.
- Высокоскоростной впускной механизм, позволяющий роботу подбирать объекты даже при перемещении на полной скорости.
- Способность единовременно подбирать несколько объектов.
- Способность последовательно подбирать несколько объектов, не сминая их и не замедляясь.
- Способность подбирать объекты различных размеров.
Передача по конвейеру (транспортировка):
Как обсуждалось выше, конвейер является распространенной разновидностью сборщика, поэтому теории, связанные с транспортировкой, имеют важное значение для проектировщиков роботов. Существует несколько расчетных характеристик ленточных конвейеров, которые проектировщики должны всегда учитывать в работе.
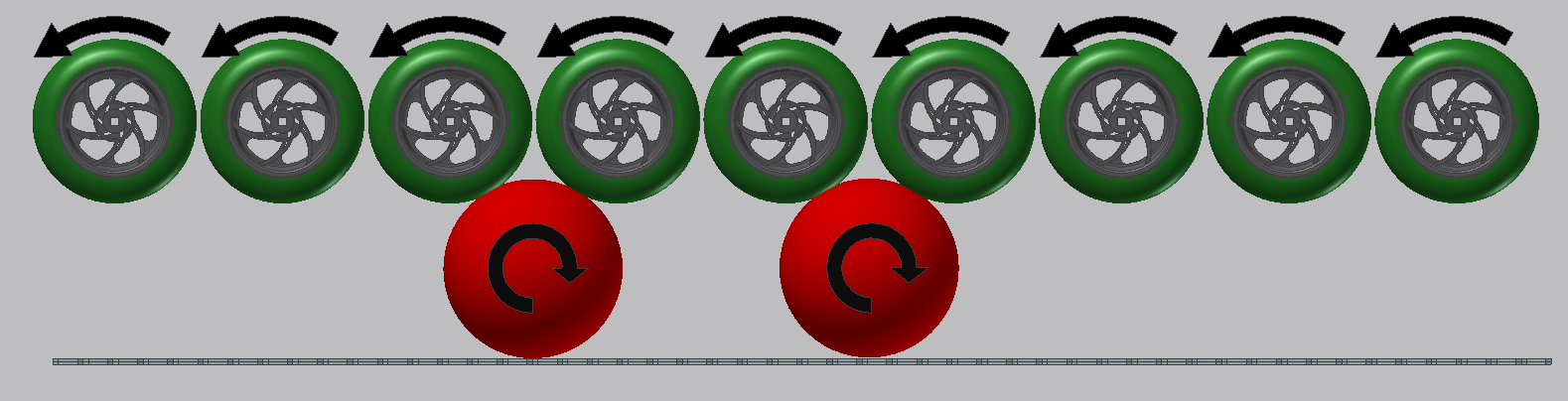
Конфигурация конвейера - от конфигурации ленточного конвейера во многом зависит поведение системы. Существует несколько типов конфигурации, которые необходимо рассмотреть. Одна из простых конфигураций состоит из единственной конвейерной ленты напротив плоской стены.

Лента этого конвейера взаимодействует с мячами, касаясь их сбоку, и катит их в заданном направлении вдоль поверхности. Эта относительно простая настройка требует применения одной конвейерной ленты. Тем не менее, она имеет ряд недостатков. Во-первых, мячи катятся, перемещаясь сквозь конструкцию сборщика на скорости, равной 1/2 скорости конвейерной ленты. Во-вторых, эта настройка не исключает возникновения смятия мячей, расположенных слишком близко друг к другу на конвейере. Так как задняя стенка первого мяча движется вверх в момент, когда передняя стенка следующего за ним мяча движется вниз, мячи могут зацепиться, что спровоцирует их смятие. Система этого типа требует очень точной настройки, чтобы исключить возможность воздействия одного объекта на ленту таким образом, чтобы лента утратила контакт со следующим объектом. Способность конвейера прикладывать достаточное количество силы трения ко всем находящимся в нем объектам очень сложно реализовать.
Чтобы поддерживать воздействие силы трения на все объекты, можно включить в конструкцию несколько независимых роликов.
В данной настройке, каждый ролик подключен к источнику питания. Данная система не так подвержена возникновению смятия, но в ней не исправлены многие проблемы первой настройки. За счет использования нескольких роликов вместо одной ленты проект существенно усложняется.
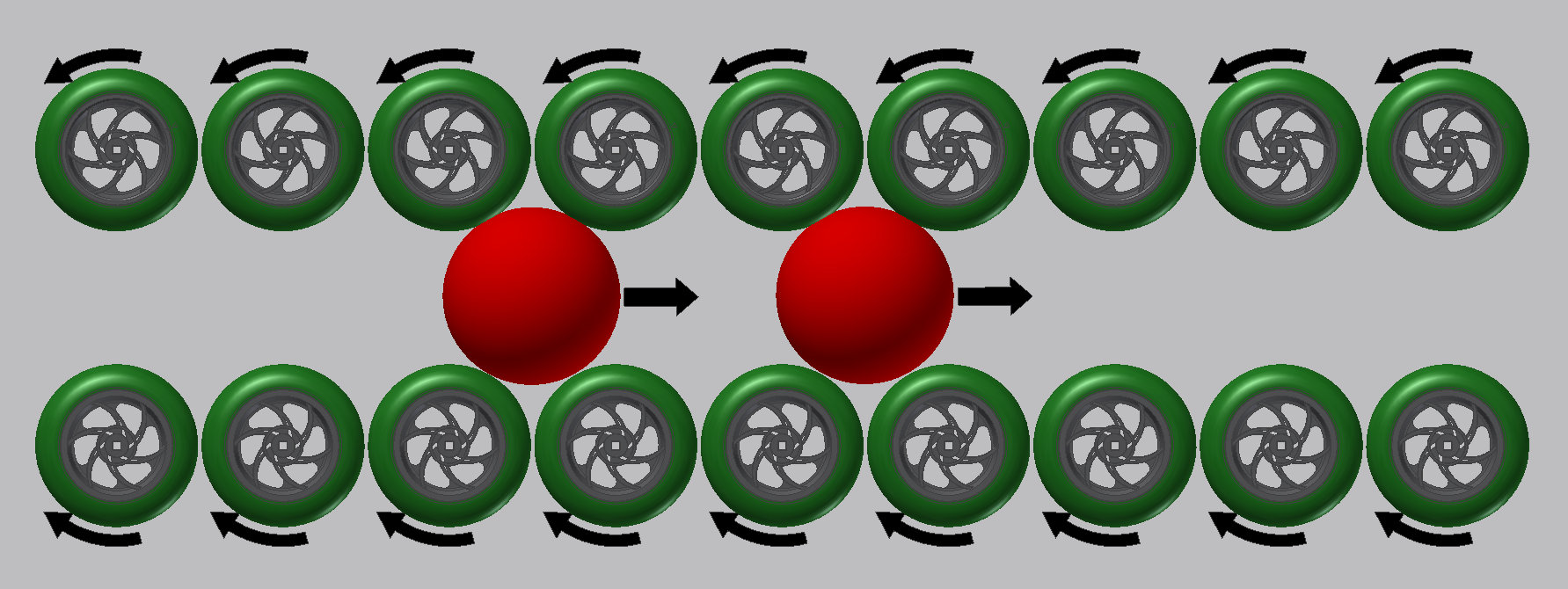
Еще один вариант - использовать два ремня.

При данной настройке шансы возникновения смятия снижаются, так как мячи не катятся; ленты тянут их вперед по прямой. Если при этом два объекта столкнутся, вряд ли произойдет их смятие. Данная система также подвержена воздействию объектов, расталкивающих ленты в разные стороны (по аналогии с системой, оснащенной одной лентой), но это воздействие компенсируется за счет использования двух лент.
Почему бы не использовать в проекте лучшие элементы систем 2 и 3? Что вы скажете о системе с роликами с обеих сторон?
Данная система должна противодействовать смятию, по аналогии с системой с двумя лентами, а также должна обеспечивать постоянное воздействие силы трения на объекты, по аналогии с системой с одной лентой. Тем не менее, она ГОРАЗДО более сложная по сравнению с системами, описываемыми выше.
Проект основан на выборе оптимального соотношения: каково простейшее решение для задачи? Проектировщики выбирают конфигурацию, которая будет наиболее эффективна для решения задачи сбора заданных объектов максимально подходящим способом, соответствующим требованиям соревнований и матчей (например, возможно, робот должен просто поднимать объекты один за другим; тогда смятие не является проблемой).
Передаточный механизм конвейера - еще одним важным требованием проекта является передаточный механизм конвейера. Очень важно, чтобы собирающий механизм правильно приводился в движение. Впускной механизм сборщика должен приводиться в движение таким образом, чтобы он вталкивал объект внутрь со скоростью, превышающей максимальную скорость ходовой части. Для системы с одной лентой это означает, что впускной механизм должен приводиться в движение таким образом, чтобы линейная скорость ленты превышала максимальную скорость ходовой части как минимум вдвое. Для системы с двумя ремнями, линейная скорость ленты должна только быть выше максимальной скорости ходовой части. Когда речь идет о передаточном механизме сборщика, важное значение имеет скорость. Необходимо удостовериться, что сборщик может преодолеть силу трения, возникающую при проталкивании объектов внутрь. Более подробно эта тема будет обсуждаться в Блоках 7 и 8.
Сжатие и гибкость - чтобы протолкнуть объект внутрь с помощью системы, состоящей из ленты и роликов, некоторая сила должна воздействовать на ленту, прижимая ее к объекту. Эта сила зачастую возникает из-за сжатия или гибкости какой-то части системы. В некоторых случаях, конвейерная лента отклоняется назад, и эта «пружина» и является источником приложения силы к объекту. В других случаях, сам объект обладает определенной гибкостью и деформируется в процессе втягивания его внутрь механизма. И, в отдельных случаях, для придания всей конвейерной сборке определенного допуска по ходу, обеспечивающего его деформацию при продвижении через него объекта, могут использоваться эластичные кольца или пружины. В этом случае пружины прикладывают нормальную силу к объекту. Найти правильный баланс для захвата объекта иногда сложно, особенно если проектируемый сборщик должен единовременно подбирать несколько объектов. Здесь, как говорилось выше, важную роль может играть конфигурация конвейера.